BenchMARL
BenchMARL 是一个专为多智能体强化学习(MARL)设计的开源基准测试库。它的核心使命是解决当前 MARL 研究中算法对比困难、实验复现性差以及评估标准不统一的痛点,帮助研究者在公平、标准化的环境下快速验证新想法。
这款工具非常适合从事多智能体系统研究的科研人员、算法工程师以及希望深入该领域的开发者使用。无论是想对比不同算法在相同任务下的表现,还是评估新模型的有效性,BenchMARL 都能提供一站式支持。
其技术亮点在于深度集成了高性能后端 TorchRL,确保了训练效率与前沿算法的实现质量;同时采用 Hydra 进行灵活的模块化配置,让用户能通过简单的命令行指令轻松切换算法、任务或模型。此外,BenchMARL 严格遵循 marl-eval 标准协议,内置了统计严谨的数据报告与可视化功能,确保实验结果不仅可复现,而且具有充分的统计学说服力。通过统一接口设计,它还极大地降低了扩展新算法或自定义环境的门槛,让研究者能专注于核心创新,而非重复构建基础设施。
使用场景
某自动驾驶实验室的研究团队正在评估多种多智能体强化学习(MARL)算法,以优化十字路口车辆协同通行的效率。
没有 BenchMARL 时
- 环境搭建繁琐:研究人员需为每种算法(如 MAPPO、QMIX)手动编写不同的数据接口和环境适配代码,耗时数周且容易出错。
- 对比难以公平:由于缺乏统一的超参数配置标准和随机种子管理,不同算法的实验结果受实现细节干扰大,无法判断性能差异是源于算法本身还是代码实现。
- 复现成本极高:团队成员间共享实验配置困难,新成员难以快速复现他人的基准测试结果,导致大量时间浪费在调试环境而非改进算法上。
- 数据分析分散:实验日志格式不统一,绘制对比图表需手动清洗数据,难以生成符合学术标准的统计分析报告。
使用 BenchMARL 后
- 一键切换实验:通过简单的命令行(如
algorithm=mappo task=vmas/balance),即可在统一架构下瞬间切换算法与任务,无需重写任何底层代码。 - 标准化公平竞技:BenchMARL 内置了标准化的配置模板和统计评估协议,确保所有算法在完全一致的环境下运行,性能对比真实可信。
- 无缝复现与协作:基于 Hydra 的模块化配置让实验参数可完整保存和分享,团队成员能轻松复现彼此工作,大幅降低沟通与调试成本。
- 自动化专业报告:工具自动兼容 marl-eval 标准,直接生成具有统计显著性的高质量对比图表和日志,让论文撰写和数据汇报事半功倍。
BenchMARL 将研究人员从重复的“造轮子”工作中解放出来,使其能专注于核心算法创新与多智能体系统的本质探索。
运行环境要求
- Linux
未说明(基于 PyTorch/TorchRL,通常支持 CUDA GPU 加速,但非强制要求)
未说明
快速开始
BenchMARL
![]()

![]()


![]()
python benchmarl/run.py algorithm=mappo task=vmas/balance
![]()
![]()
什么是BenchMARL 🧐?
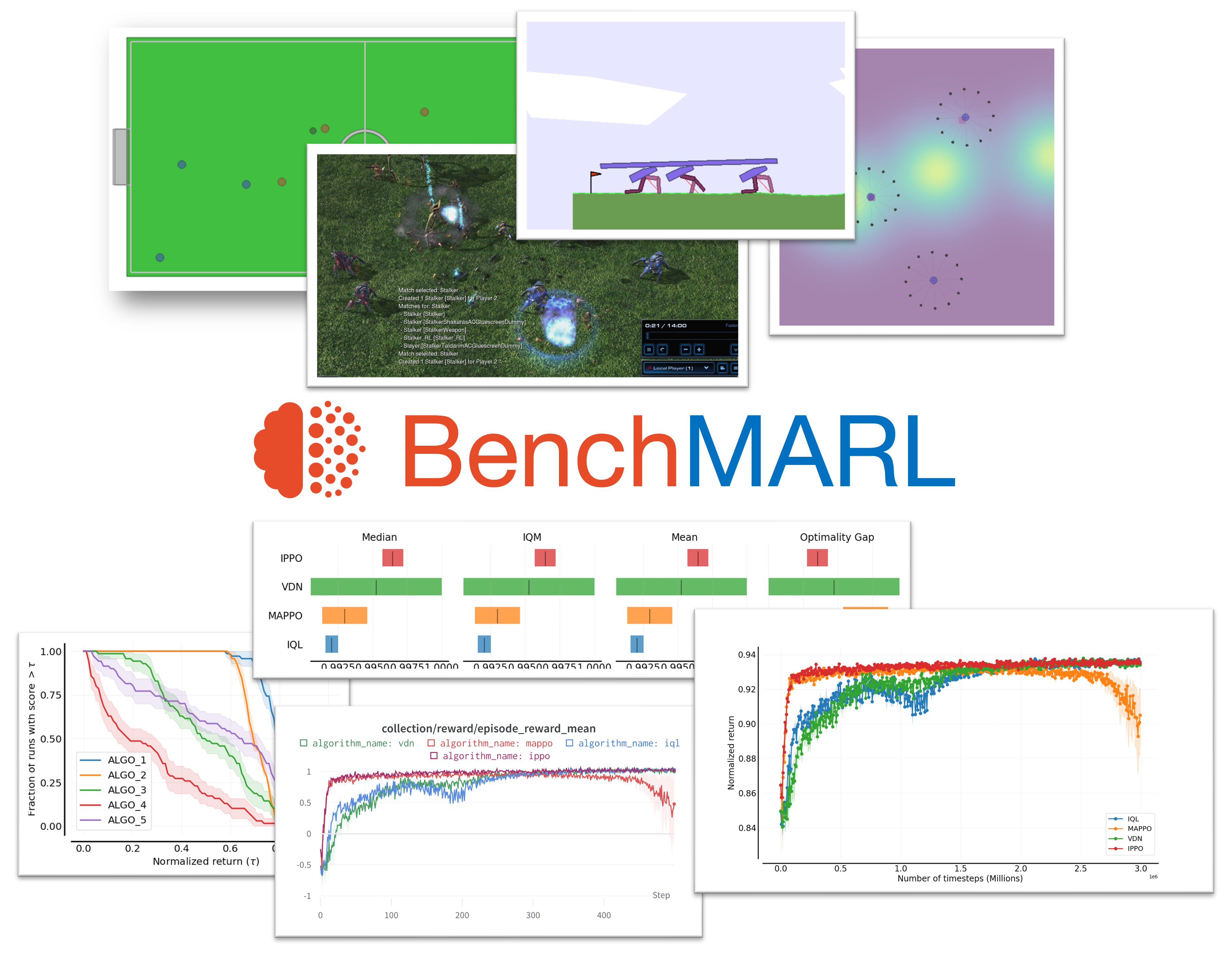
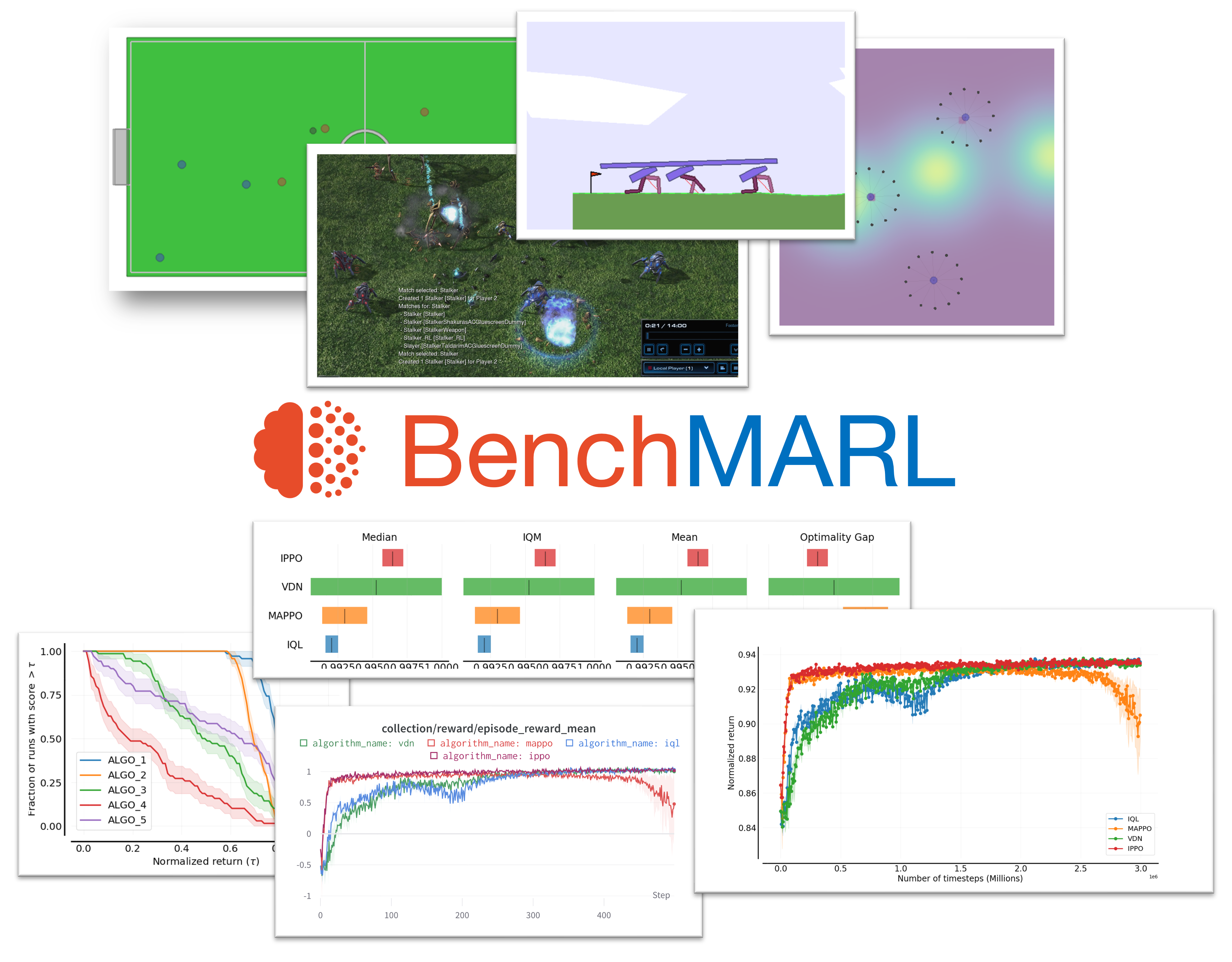
BenchMARL是一个多智能体强化学习(MARL)训练库,旨在实现不同MARL算法和环境之间的可重复性和基准测试。其使命是提供一个标准化的接口,便于新算法和环境的集成,从而与现有解决方案进行公平比较。BenchMARL以TorchRL为后端,这使其具备高性能和最先进的实现。它还使用hydra进行灵活且模块化的配置,并且其数据报告与marl-eval兼容,以支持标准化和统计上稳健的评估。
BenchMARL的核心设计原则包括:
- 通过系统化的配置基础和标准化实现可重复性
- 标准化且统计稳健的绘图与报告
- 实验独立于算法、环境和模型的选择
- 覆盖广泛的MARL生态系统
- 易于实现新的算法、环境和模型
- 充分利用TorchRL的知识与基础设施,而不重复造轮子
我为什么要使用BenchMARL 🤔?
你可能会问,为什么我要使用BenchMARL呢?其实,你可以用BenchMARL来比较不同的算法、环境和模型,检验你的新研究与现有成果的差异,或者只是想初步了解这一领域,快速掌握当前的研究现状。
目录
如何使用
Notebooks
 运行BenchMARL实验。
运行BenchMARL实验。- 在VMAS中创建场景并在BenchMARL中训练。我们将创建一个场景,其中多个具有不同形态的机器人需要在避开彼此及障碍物的同时到达各自的目标,并使用MAPPO和MLP/GNN策略进行训练。
安装
安装TorchRL
你可以从PyPI安装TorchRL。
pip install torchrl
更多详细信息或安装夜间版本,请参阅 TorchRL安装指南。
安装BenchMARL
你可以直接从GitHub安装:
pip install benchmarl
或者克隆到本地以访问配置文件和脚本:
git clone https://github.com/facebookresearch/BenchMARL.git
pip install -e BenchMARL
安装环境
BenchMARL中的所有环境依赖项都是可选的,可以单独安装。
VMAS
pip install vmas
PettingZoo
pip install "pettingzoo[all]"
MeltingPot
pip install dm-meltingpot
MAgent2
pip install git+https://github.com/Farama-Foundation/MAgent2
SMACv2
请按照环境仓库中的说明进行操作。 这里是我们如何在Linux上安装它的方法。
运行
实验使用一个默认配置启动,该配置可以通过多种方式覆盖。要了解如何自定义和覆盖配置,请参阅配置部分。
命令行
要从命令行启动一个实验,可以执行以下命令:
python benchmarl/run.py algorithm=mappo task=vmas/balance
![]()
得益于hydra,你可以像运行多组实验一样执行基准测试,例如:
python benchmarl/run.py -m algorithm=mappo,qmix,masac task=vmas/balance,vmas/sampling seed=0,1
![]()
hydra 多组运行的默认实现是顺序执行,但也有并行和slurm启动器可供选择。
脚本
你也可以在脚本中加载并启动你的实验:
experiment = Experiment(
task=VmasTask.BALANCE.get_from_yaml(),
algorithm_config=MappoConfig.get_from_yaml(),
model_config=MlpConfig.get_from_yaml(),
critic_model_config=MlpConfig.get_from_yaml(),
seed=0,
config=ExperimentConfig.get_from_yaml(),
)
experiment.run()
![]()
你还可以在Benchmark中运行多个实验:
benchmark = Benchmark(
algorithm_configs=[
MappoConfig.get_from_yaml(),
QmixConfig.get_from_yaml(),
MasacConfig.get_from_yaml(),
],
tasks=[
VmasTask.BALANCE.get_from_yaml(),
VmasTask.SAMPLING.get_from_yaml(),
],
seeds={0, 1},
experiment_config=ExperimentConfig.get_from_yaml(),
model_config=MlpConfig.get_from_yaml(),
critic_model_config=MlpConfig.get_from_yaml(),
)
benchmark.run_sequential()
![]()
概念
BenchMARL 的目标是将不同的多智能体强化学习环境和算法统一到相同的接口下,从而实现公平且可重复的比较与基准测试。BenchMARL 是一个全流程的统一训练库,旨在让用户只需一行代码就能在我们的算法和任务之间进行任何他们想要的比较。为了实现这一目标,BenchMARL 将来自TorchRL的组件相互连接起来,后者提供了一个高效可靠的后端。
该库为每个组件都提供了一个默认配置。虽然其中一些配置是可以更改的(例如实验配置),但另一些配置(如任务)则不应被更改,以确保结果的可重复性。为此,BenchMARL 的每个版本都会配有一个默认配置。
接下来,我们将介绍该库中的每个组件。
实验。实验是一次训练运行,其中算法、任务和模型都是固定的。实验通过传递这些值以及随机种子和实验超参数来配置。实验的超参数涵盖了在线和离线算法、离散和连续动作,以及概率性和确定性策略(因为它们与所使用的算法或任务无关)。实验可以从命令行或脚本中启动。更多信息请参阅运行部分。
基准测试。在该库中,我们称“基准测试”为一组实验的集合,这些实验可以在任务、算法或模型上有所不同。基准测试中的所有实验共享相同的实验配置。基准测试允许以标准化的方式比较不同的多智能体强化学习组件。基准测试可以从命令行或脚本中启动。更多信息请参阅运行部分。
算法。算法是由多个组件(例如损失函数、回放缓冲区等)组成的集合,它们决定了训练策略。以下是 BenchMARL 中当前已实现算法的表格。
| 名称 | 开关策略 | 策略-价值网络 | 评价网络是否具备完全可观测性 | 动作兼容性 | 概率型策略网络 |
|---|---|---|---|---|---|
| MAPPO | 开 | 是 | 是 | 连续 + 离散 | 是 |
| IPPO | 开 | 是 | 否 | 连续 + 离散 | 是 |
| MADDPG | 关 | 是 | 是 | 连续 | 否 |
| IDDPG | 关 | 是 | 否 | 连续 | 否 |
| MASAC | 关 | 是 | 是 | 连续 + 离散 | 是 |
| ISAC | 关 | 是 | 否 | 连续 + 离散 | 是 |
| QMIX | 关 | 否 | 不适用 | 离散 | 否 |
| VDN | 关 | 否 | 不适用 | 离散 | 否 |
| IQL | 关 | 否 | 不适用 | 离散 | 否 |
任务。任务是来自特定环境的场景,构成了需要解决的多智能体强化学习挑战。 它们在许多方面有所不同,以下是BenchMARL中当前环境的表格:
| 环境 | 任务 | 合作性 | 全局状态 | 奖励函数 | 动作空间 | 向量化 |
|---|---|---|---|---|---|---|
| VMAS | 27 | 合作 + 竞争 | 否 | 共享 + 独立 + 全局 | 连续 + 离散 | 是 |
| SMACv2 | 15 | 合作 | 是 | 全局 | 离散 | 否 |
| MPE | 8 | 合作 + 竞争 | 是 | 共享 + 独立 | 连续 + 离散 | 否 |
| SISL | 2 | 合作 | 否 | 共享 | 连续 | 否 |
| MeltingPot | 49 | 合作 + 竞争 | 是 | 独立 | 离散 | 否 |
| MAgent2 | 1 | 合作 + 竞争 | 是 | 分组全局 | 离散 | 否 |
[!NOTE]
BenchMARL 使用 TorchRL MARL API 来对智能体进行分组。 在竞争性环境中,例如 MPE,队伍会分属不同组别。每个组别都有自己的损失、模型、经验回放池等。 参数共享选项指的是组内共享。更多信息请参阅创建自定义算法 的示例。
模型。模型是用于处理数据的神经网络。它们可以作为策略网络使用,也可以根据需求用作评价网络。我们提供了一组基础模型(层)以及一个用于串联不同层的SequenceModel。所有模型都可以在智能体组内选择是否进行参数共享。以下是BenchMARL中实现的模型列表:
| 名称 | 去中心化 | 局部输入的集中式 | 全局输入的集中式 |
|---|---|---|---|
| MLP | 是 | 是 | 是 |
| GRU | 是 | 是 | 是 |
| LSTM | 是 | 是 | 是 |
| GNN | 是 | 是 | 否 |
| CNN | 是 | 是 | 是 |
| Deepsets | 是 | 是 | 是 |
微调后的公开基准测试
[!WARNING]
本节仍在开发中。我们正不断优化实验,以便用户能够访问最先进的基准测试。
如果您希望参与这项工作,请与我们联系。
在 fine_tuned 文件夹中,我们收集了一些针对特定环境的已测试超参数,以帮助用户快速启动基准测试。您只需运行该文件夹中的脚本,即可自动使用建议的超参数。
我们将为您调整基准测试,并将配置文件和基准测试图表公开发布到 Wandb 上。
目前可用的基准包括:
- VMAS:

以下是结果表格:
环境 |
样本效率曲线(所有任务) |
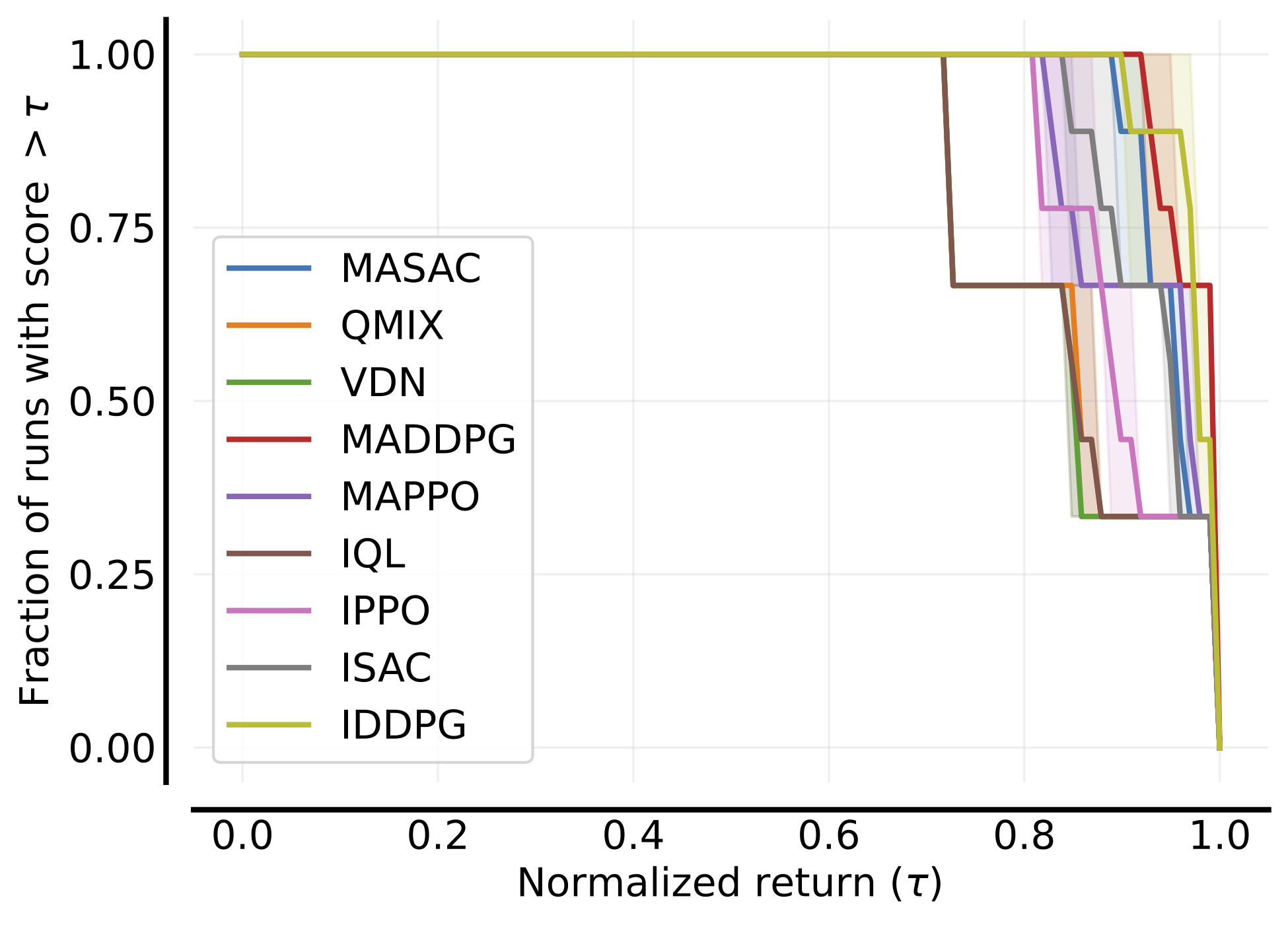
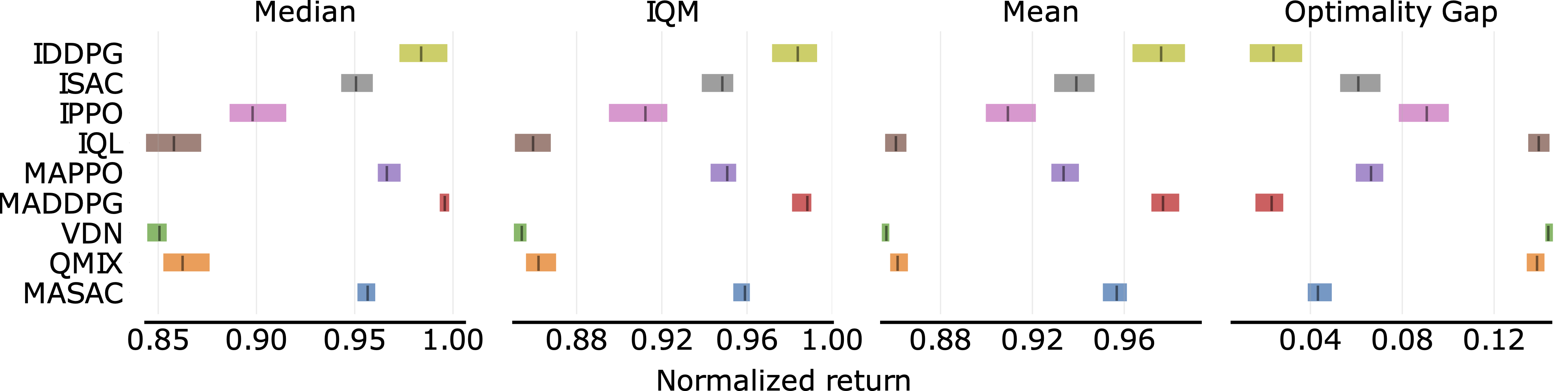
性能概况 |
综合评分 |
|---|---|---|---|
| VMAS | 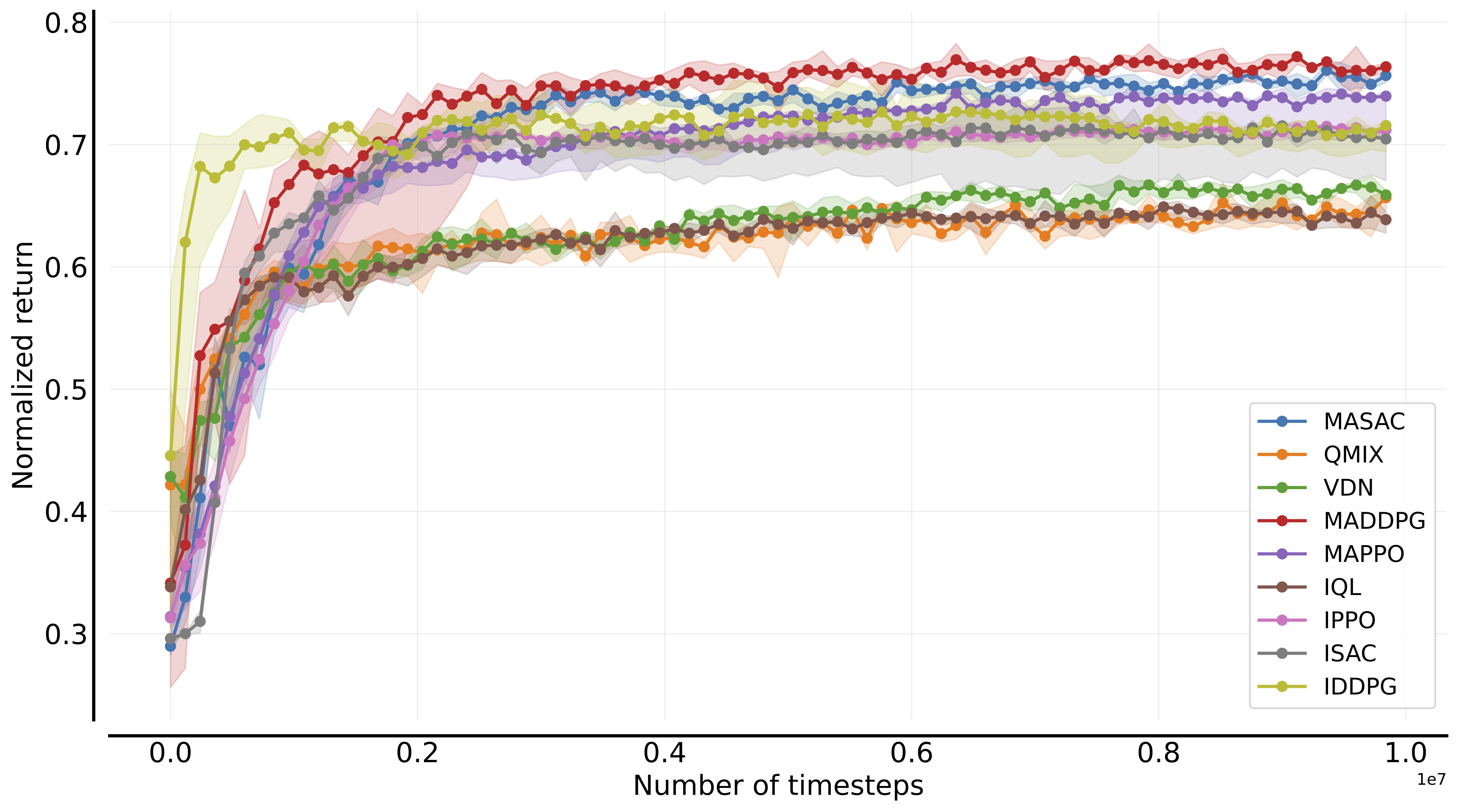 |
 |
 |
报告与绘图
报告与绘图功能与 marl-eval 兼容。
如果 experiment.create_json=True(这是 实验配置 中的默认设置),则会在实验输出文件夹中生成一个名为 {experiment_name}.json 的文件,其格式符合 marl-eval 的标准。
您可以使用 eval_results 中的工具加载并合并这些文件,从而轻松创建美观的基准测试图表。再也不用为 matplotlib 和 LaTeX 而烦恼了!
![]()
扩展
BenchMARL 的核心原则之一是允许用户利用现有的算法和任务实现来评估自己新提出的解决方案。
为此,我们在 算法、任务 和 模型 中提供了具有简单抽象方法的标准接口。
要在库中引入您的解决方案,您只需实现这些基类所暴露的抽象方法,这些基类使用 TorchRL 库中的对象。
以下是一个如何创建自定义算法的示例 ![]() 。
。
以下是一个如何创建自定义任务的示例 ![]() 。
。
以下是一个如何创建自定义模型的示例 ![]() 。
。
配置
如 运行 部分所述,该项目既可以在脚本本身中进行配置,也可以通过 hydra 进行配置。
我们建议您阅读 hydra 的文档,以熟悉其所有功能。
项目中的每个组件都在 BenchMARL 的 conf 树 中拥有对应的 YAML 配置文件。
这些配置文件会被加载到 Python 数据类中,作为验证参数名称和类型的模式。这样我们既能将配置与代码分离,又能通过强类型检查确保参数的正确性!
您还可以直接从脚本中调用 ComponentConfig.get_from_yaml() 来加载和验证配置 YAML 文件,而无需使用 hydra。
实验
实验配置位于 benchmarl/conf/config.yaml。借助 Hydra 配置,运行自定义实验变得极为简便。库的默认配置包含在 benchmarl/conf 文件夹中。
运行实验时,可以通过以下方式覆盖其超参数:
python benchmarl/run.py task=vmas/balance algorithm=mappo experiment.lr=0.03 experiment.evaluation=true experiment.train_device="cpu"
实验超参数从 benchmarl/conf/experiment/base_experiment.yaml 加载到一个数据类 ExperimentConfig 中,该类定义了这些参数的有效范围。这样可以确保只加载预期的参数,并且类型正确。你也可以通过调用 ExperimentConfig.get_from_yaml() 直接从脚本中加载这些参数。
以下是使用 Hydra 覆盖实验超参数的示例 ![]() ,或直接从脚本中覆盖
,或直接从脚本中覆盖 ![]() 。
。
算法
在启动 BenchMARL 时,你可以覆盖算法的配置。
python benchmarl/run.py task=vmas/balance algorithm=masac algorithm.num_qvalue_nets=3 algorithm.target_entropy=auto algorithm.share_param_critic=true
可用算法及其默认配置可在 benchmarl/conf/algorithm 中找到。它们会被加载到每个算法对应的数据类 AlgorithmConfig 中,以定义其参数范围。这确保了只会加载预期的参数,并且类型正确。你也可以通过调用 YourAlgorithmConfig.get_from_yaml() 直接从脚本中加载这些配置。
以下是使用 Hydra 覆盖算法超参数的示例 ![]() ,或直接从脚本中覆盖
,或直接从脚本中覆盖 ![]() 。
。
任务
在启动 BenchMARL 时,你可以覆盖任务的配置。然而,出于可重复性的考虑,不建议在基准测试中这样做,因为任务应具有固定的版本和参数。
python benchmarl/run.py task=vmas/balance algorithm=mappo task.n_agents=4
可用任务及其默认配置可在 benchmarl/conf/task 中找到。它们会被加载到一个数据类 TaskConfig 中,用于定义任务的范围。任务是以环境名称为前缀的枚举类型。例如,VmasTask.NAVIGATION 表示 VMAS 模拟器中的导航任务。这支持自动补全功能,并能一次性查看所有可用任务。你也可以通过调用 YourEnvTask.TASK_NAME.get_from_yaml() 直接从脚本中加载这些配置。
以下是使用 Hydra 覆盖任务超参数的示例 ![]() ,或直接从脚本中覆盖
,或直接从脚本中覆盖 ![]() 。
。
模型
在启动 BenchMARL 时,你可以覆盖模型的配置。默认情况下,会加载一个具有默认配置的 MLP 模型。你可以按如下方式更改:
python benchmarl/run.py task=vmas/balance algorithm=mappo model=layers/mlp model=layers/mlp model.layer_class="torch.nn.Linear" "model.num_cells=[32,32]" model.activation_class="torch.nn.ReLU"
可用模型及其配置可在 benchmarl/conf/model/layers 中找到。它们会被加载到一个数据类 ModelConfig 中,用于定义模型的参数范围。你也可以通过调用 YourModelConfig.get_from_yaml() 直接从脚本中加载这些配置。
以下是使用 Hydra 覆盖模型超参数的示例 ![]() ,或直接从脚本中覆盖
,或直接从脚本中覆盖 ![]() 。
。
序列模型
你可以将多个层组合成一个序列模型。可用层的名称位于 benchmarl/conf/model/layers 文件夹中。
python benchmarl/run.py task=vmas/balance algorithm=mappo model=sequence "model.intermediate_sizes=[256]" "model/layers@model.layers.l1=mlp" "model/layers@model.layers.l2=mlp" "+model/layers@model.layers.l3=mlp" "model.layers.l3.num_cells=[3]"
使用 "+model/layers@model.layers.l3=mlp" 添加一层。
使用 "~model.layers.l2" 移除一层。
使用 "model.layers.l1.num_cells=[3]" 配置某一层。
以下是使用 Hydra 创建序列模型的示例 ![]() ,或直接从脚本中创建
,或直接从脚本中创建 ![]() 。
。
功能
BenchMARL 具有以下几项功能:
- 包含集成和训练测试流程的测试 CI,适用于所有模拟器和算法。
- 集成到官方 TorchRL 生态系统中,提供专门的支持。
- 可以为不同的智能体群体使用不同的算法和模型(参见
examples/ensemble)。
日志记录
BenchMARL 兼容 TorchRL 日志记录器。可以在实验配置文件 (benchmarl/conf/experiment/base_experiment.yaml) 中提供日志记录器名称列表。可用选项包括:wandb、csv、mflow、tensorboard,以及 TorchRL 中提供的其他任何选项。你可以在 YAML 配置文件或脚本参数中指定日志记录器,例如:
python benchmarl/run.py algorithm=mappo task=vmas/balance "experiment.loggers=[wandb]"
wandb 日志记录器与实验恢复完全兼容,能够自动恢复已加载实验的运行。
检查点
实验可以每隔 experiment.checkpoint_interval 个收集到的帧进行一次检查点保存。
实验会使用一个用于日志记录和检查点保存的输出文件夹,该文件夹可以在 experiment.save_folder 中指定。
如果未指定,
默认将使用 Hydra 的输出文件夹(如果使用 Hydra)或当前脚本启动的目录。
输出文件夹中会为每个实验创建一个以实验名称命名的子文件夹,
其检查点文件将存储在该实验文件夹内的 "checkpoints" 文件夹中。
python benchmarl/run.py task=vmas/balance algorithm=mappo experiment.max_n_iters=3 experiment.on_policy_collected_frames_per_batch=100 experiment.checkpoint_interval=100
要从检查点加载模型,只需将检查点文件的绝对路径传递给 experiment.restore_file 即可。
python benchmarl/run.py task=vmas/balance algorithm=mappo experiment.max_n_iters=6 experiment.on_policy_collected_frames_per_batch=100 experiment.restore_file="/hydra/experiment/folder/checkpoint/checkpoint_300.pt"
以下是修改配置时的 Python 示例:
![]() 以及保持配置不变的示例:
以及保持配置不变的示例:
![]() 。
。
此外,还可以直接通过文件名来恢复和评估 Hydra 实验:
python benchmarl/evaluate.py ../outputs/2024-09-09/20-39-31/mappo_balance_mlp__cd977b69_24_09_09-20_39_31/checkpoints/checkpoint_100.pt
python benchmarl/resume.py ../outputs/2024-09-09/20-39-31/mappo_balance_mlp__cd977b69_24_09_09-20_39_31/checkpoints/checkpoint_100.pt
回调函数
实验可以选择性地接受一个 Callback 列表,这些回调对象包含多个方法,
例如 on_batch_collected、on_train_end 和 on_evaluation_end,可用于监控训练过程中的各项指标。
![]()
引用 BenchMARL
如果您在研究中使用了 BenchMARL,请使用以下 BibTeX 条目:
@article{bettini2024benchmarl,
author = {Matteo Bettini and Amanda Prorok and Vincent Moens},
title = {BenchMARL: 多智能体强化学习基准测试},
journal = {机器学习研究期刊},
year = {2024},
volume = {25},
number = {217},
pages = {1--10},
url = {http://jmlr.org/papers/v25/25-217.html}
}
许可证
BenchMARL 采用 MIT 许可证授权。详情请参阅 LICENSE 文件。
版本历史
1.5.22026/02/071.5.12025/11/101.5.02025/05/011.4.02025/02/061.3.02024/10/251.2.12024/07/161.2.02024/04/261.1.12024/03/041.1.02024/02/021.0.02023/11/260.0.42023/10/310.0.32023/10/250.0.22023/10/16常见问题
相似工具推荐
openclaw
OpenClaw 是一款专为个人打造的本地化 AI 助手,旨在让你在自己的设备上拥有完全可控的智能伙伴。它打破了传统 AI 助手局限于特定网页或应用的束缚,能够直接接入你日常使用的各类通讯渠道,包括微信、WhatsApp、Telegram、Discord、iMessage 等数十种平台。无论你在哪个聊天软件中发送消息,OpenClaw 都能即时响应,甚至支持在 macOS、iOS 和 Android 设备上进行语音交互,并提供实时的画布渲染功能供你操控。 这款工具主要解决了用户对数据隐私、响应速度以及“始终在线”体验的需求。通过将 AI 部署在本地,用户无需依赖云端服务即可享受快速、私密的智能辅助,真正实现了“你的数据,你做主”。其独特的技术亮点在于强大的网关架构,将控制平面与核心助手分离,确保跨平台通信的流畅性与扩展性。 OpenClaw 非常适合希望构建个性化工作流的技术爱好者、开发者,以及注重隐私保护且不愿被单一生态绑定的普通用户。只要具备基础的终端操作能力(支持 macOS、Linux 及 Windows WSL2),即可通过简单的命令行引导完成部署。如果你渴望拥有一个懂你
n8n
n8n 是一款面向技术团队的公平代码(fair-code)工作流自动化平台,旨在让用户在享受低代码快速构建便利的同时,保留编写自定义代码的灵活性。它主要解决了传统自动化工具要么过于封闭难以扩展、要么完全依赖手写代码效率低下的痛点,帮助用户轻松连接 400 多种应用与服务,实现复杂业务流程的自动化。 n8n 特别适合开发者、工程师以及具备一定技术背景的业务人员使用。其核心亮点在于“按需编码”:既可以通过直观的可视化界面拖拽节点搭建流程,也能随时插入 JavaScript 或 Python 代码、调用 npm 包来处理复杂逻辑。此外,n8n 原生集成了基于 LangChain 的 AI 能力,支持用户利用自有数据和模型构建智能体工作流。在部署方面,n8n 提供极高的自由度,支持完全自托管以保障数据隐私和控制权,也提供云端服务选项。凭借活跃的社区生态和数百个现成模板,n8n 让构建强大且可控的自动化系统变得简单高效。
stable-diffusion-webui
stable-diffusion-webui 是一个基于 Gradio 构建的网页版操作界面,旨在让用户能够轻松地在本地运行和使用强大的 Stable Diffusion 图像生成模型。它解决了原始模型依赖命令行、操作门槛高且功能分散的痛点,将复杂的 AI 绘图流程整合进一个直观易用的图形化平台。 无论是希望快速上手的普通创作者、需要精细控制画面细节的设计师,还是想要深入探索模型潜力的开发者与研究人员,都能从中获益。其核心亮点在于极高的功能丰富度:不仅支持文生图、图生图、局部重绘(Inpainting)和外绘(Outpainting)等基础模式,还独创了注意力机制调整、提示词矩阵、负向提示词以及“高清修复”等高级功能。此外,它内置了 GFPGAN 和 CodeFormer 等人脸修复工具,支持多种神经网络放大算法,并允许用户通过插件系统无限扩展能力。即使是显存有限的设备,stable-diffusion-webui 也提供了相应的优化选项,让高质量的 AI 艺术创作变得触手可及。
everything-claude-code
everything-claude-code 是一套专为 AI 编程助手(如 Claude Code、Codex、Cursor 等)打造的高性能优化系统。它不仅仅是一组配置文件,而是一个经过长期实战打磨的完整框架,旨在解决 AI 代理在实际开发中面临的效率低下、记忆丢失、安全隐患及缺乏持续学习能力等核心痛点。 通过引入技能模块化、直觉增强、记忆持久化机制以及内置的安全扫描功能,everything-claude-code 能显著提升 AI 在复杂任务中的表现,帮助开发者构建更稳定、更智能的生产级 AI 代理。其独特的“研究优先”开发理念和针对 Token 消耗的优化策略,使得模型响应更快、成本更低,同时有效防御潜在的攻击向量。 这套工具特别适合软件开发者、AI 研究人员以及希望深度定制 AI 工作流的技术团队使用。无论您是在构建大型代码库,还是需要 AI 协助进行安全审计与自动化测试,everything-claude-code 都能提供强大的底层支持。作为一个曾荣获 Anthropic 黑客大奖的开源项目,它融合了多语言支持与丰富的实战钩子(hooks),让 AI 真正成长为懂上
opencode
OpenCode 是一款开源的 AI 编程助手(Coding Agent),旨在像一位智能搭档一样融入您的开发流程。它不仅仅是一个代码补全插件,而是一个能够理解项目上下文、自主规划任务并执行复杂编码操作的智能体。无论是生成全新功能、重构现有代码,还是排查难以定位的 Bug,OpenCode 都能通过自然语言交互高效完成,显著减少开发者在重复性劳动和上下文切换上的时间消耗。 这款工具专为软件开发者、工程师及技术研究人员设计,特别适合希望利用大模型能力来提升编码效率、加速原型开发或处理遗留代码维护的专业人群。其核心亮点在于完全开源的架构,这意味着用户可以审查代码逻辑、自定义行为策略,甚至私有化部署以保障数据安全,彻底打破了传统闭源 AI 助手的“黑盒”限制。 在技术体验上,OpenCode 提供了灵活的终端界面(Terminal UI)和正在测试中的桌面应用程序,支持 macOS、Windows 及 Linux 全平台。它兼容多种包管理工具,安装便捷,并能无缝集成到现有的开发环境中。无论您是追求极致控制权的资深极客,还是渴望提升产出的独立开发者,OpenCode 都提供了一个透明、可信
ComfyUI
ComfyUI 是一款功能强大且高度模块化的视觉 AI 引擎,专为设计和执行复杂的 Stable Diffusion 图像生成流程而打造。它摒弃了传统的代码编写模式,采用直观的节点式流程图界面,让用户通过连接不同的功能模块即可构建个性化的生成管线。 这一设计巧妙解决了高级 AI 绘图工作流配置复杂、灵活性不足的痛点。用户无需具备编程背景,也能自由组合模型、调整参数并实时预览效果,轻松实现从基础文生图到多步骤高清修复等各类复杂任务。ComfyUI 拥有极佳的兼容性,不仅支持 Windows、macOS 和 Linux 全平台,还广泛适配 NVIDIA、AMD、Intel 及苹果 Silicon 等多种硬件架构,并率先支持 SDXL、Flux、SD3 等前沿模型。 无论是希望深入探索算法潜力的研究人员和开发者,还是追求极致创作自由度的设计师与资深 AI 绘画爱好者,ComfyUI 都能提供强大的支持。其独特的模块化架构允许社区不断扩展新功能,使其成为当前最灵活、生态最丰富的开源扩散模型工具之一,帮助用户将创意高效转化为现实。