DQN-based-UAV-3D_path_planer
RLGF 是一个专为无人机深度强化学习打造的通用训练框架,旨在简化复杂的三维路径规划任务。它有效解决了研究人员在开发无人机智能决策系统时,面临的环境建模繁琐、算法切换困难以及轨迹可视化不便等痛点。
该工具非常适合从事无人机控制算法研究的科研人员、高校学生以及相关领域的开发者使用。其核心亮点在于高度的灵活性与集成度:用户只需通过简单的 XML 配置文件,即可自定义无人机的物理参数(如速度、能耗、转向角)及任务环境,无需深入底层代码便能快速构建专属实验场景。框架内置了 DQN、PPO、SAC、DDPG 等多种主流深度强化学习算法,支持一键切换对比不同模型效果。此外,RLGF 还提供了强大的可视化支持,能自动生成 HTML 格式的飞行轨迹图,并可选配数据库实现动态三维演示,让训练过程与结果一目了然。无论是验证新算法还是进行教学演示,RLGF 都能提供高效、专业的技术支持。
使用场景
某智慧城市物流团队需要在密集建筑群中部署无人机,以自动规划出兼顾能耗最低与避障安全的最优三维配送航线。
没有 DQN-based-UAV-3D_path_planer 时
- 算法验证周期长:每次尝试切换 DQN、PPO 或 SAC 等不同强化学习算法,都需要重写大量底层训练代码,耗时数天且容易出错。
- 环境建模门槛高:难以快速构建包含真实建筑高度、动态障碍物及复杂飞行功耗模型的 3D 仿真环境,导致仿真与现实差距大。
- 参数调优靠猜:无人机的最大转向角、加速度及不同速度下的功耗参数缺乏灵活配置接口,只能硬编码修改,调试效率极低。
- 结果复盘困难:训练产生的轨迹数据仅存为枯燥的日志文件,缺乏直观的 3D 可视化手段,难以分析撞机原因或路径冗余问题。
使用 DQN-based-UAV-3D_path_planer 后
- 算法一键切换:仅需修改 XML 配置文件中的
<Trainer>标签,即可在几分钟内从 DQN 切换至 DDQN 或 PPO 进行对比训练,大幅加速算法选型。 - 高保真场景定制:通过
buildings.xml和自定义环境类,快速还原城市楼宇分布,并内置了精确的飞行能耗模型,使仿真结果极具参考价值。 - 精细化参数控制:利用
UAV.xml灵活定义无人机物理极限与功耗曲线,支持动态调整子任务粒度,让策略更贴合实际硬件性能。 - 轨迹动态可视:训练结束后自动生成 HTML 格式的 3D 飞行轨迹图,并可对接 MySQL 数据库实现多轮次迭代的路径动态回放,问题定位一目了然。
DQN-based-UAV-3D_path_planer 通过配置驱动的开发模式与全链路可视化能力,将无人机三维路径规划的算法研发效率提升了数倍。
运行环境要求
- 未说明
未说明
未说明
快速开始
RLGF 











RLGF是一个适用于无人机深度强化学习任务的通用训练框架,构建了适用于无人机任务的动作模型,包括连续飞行动作与离散飞行动作。预置了飞行能量消耗模型与航线规划模型。能够根据自身任务自定义任务环境模型与无人机模型。并集成了多种主流的深度强化学习算法。
- 自定义开发: 该框架以配置XML文件的形式制定无人机强化学习任务,隐藏了深度强化学习过程的过程。仅需要重写环境模型与无人机模型中特定的函数,便能快速实现自定义无人机任务的开发。
- 多算法集成: 集成了主流的强化学习算法如DQN、AC、DDQN、DuelingDQN、PPO、SAC、DDPG,仅需通过配置XML文件即可快速更换任务所需算法进行训练。
- 无人机参数自定义: 能够根据XML文件配置无人机的性能参数,包括加速度、动作更新函数、状态空间函数、APF动态避障模式是否启用、初始坐标、最大/最小速度、最大转向角、最大任务时间步长、子任务粒度、飞行功耗参数(不同速度下无人机的飞行功耗不同)、通信功率等。也支持自定义无人机参数并载入进自定义的无人机模型。
- 训练日志支持: 能够将训练过程中的参数以csv的形式保存在logs文件夹下(需自定义保存形式)。
- 多维度无人机轨迹结果可视化:每轮任务迭代后将生成轨迹以HTML的形式保存在/DataBase/experience目录下。若本地或者服务器配置有MySQL数据库,可以通过提供的接口将航线数据存放到数据库中,并通过PathViewer的java后端项目实现每次迭代任务的无人机轨迹动态可视化。
- 支持私密消息: 服务端能够通过特定指令向公屏发送指定用户可见的私密消息,可用于文字交互游戏的角色分发。
开发环境
- 训练环境: Python 3.9.7, Pytorch 1.11.0.
- 可视化平台: jdk 17, Spring 6.15, maven, MySQL 10.3.19.
引用
- 内置算法均改自《动手学强化学习》中的代码。github链接:https://github.com/boyu-ai/Hands-on-RL
项目目录简介
- RLGF/
- README.md
- requirements.txt
- Agents/ #智能体模型所在目录,存放无人机或其他有关的智能体模型
- BaseClass/ #存放基本的模型基类,以及通用计算工具
- config/
- buildings.xml #环境中的建筑物配置文件。
- DB.xml #数据库配置,若无数据库,可以忽略。
- PathPlan_City.xml #案例环境模型的配置文件,定义了1个UAV在建筑群中执行航线规划任务。
- Trainer.xmll #所采用的训练器的配置文件。
- UAV.xml #案例无人机配置文件,定义了UAV在轨迹规划任务中的相关配置。
- UI.xml #PyEchart配置文件,不建议更改。
- DataBase/
- experience/ #以html的形式存放无人机的轨迹结果(静态)。
- Connector.py #提供连接数据库的功能。
- Env/ #存放环境模型类。
- FactoryClass/ #对应的工厂类。
- logs/ #存放运行日志。
- Mod/ #存放神经网络模型。
- Obstacles/ #存放自定义的障碍物类。
- Trainer/ #存放已经实现的强化学习算法训练器。
- simulator.py #训练器启动器。
基本使用案例
模型训练:
修改案例环境配置文件PathPlan_City。
<simulator>
<env>
<Env_Type>PathPlan_City</Env_Type> <!-- 自定义环境模型名称,与py文件名一致-->
<len>500</len> <!-- 环境规划空间长度-->
<width>500</width> <!-- 环境规划空间宽度-->
<h>100</h> <!-- 环境规划空间高度-->
<eps>0.1</eps> <!-- epslon最小贪心概率-->
<Is_AC>0</Is_AC>
<Is_FL>0</Is_FL> <!-- 是否启用联邦学习进行分布式训练(需要多个智能体)-->
<Is_On_Policy>0</Is_On_Policy>
<FL_Loop>3</FL_Loop>
<print_loop>2</print_loop>
<num_UAV>1</num_UAV> <!-- 无人机数目-->
<Agent>
<xml_path_agent>./config/UAV.xml</xml_path_agent> <!-- 案例无人机的配置文件-->
<Trainer>
<Trainer_path>./config/Trainer.xml</Trainer_path> <!-- 训练器的配置文件-->
</Trainer>
</Agent>
<Obstacles>
<buildings>./config/buildings.xml</buildings> <!-- 建筑物分布的配置文件-->
</Obstacles>
<UI>
<UI_path>./config/UI.xml</UI_path>
</UI>
<DB>
<DB_path>./config/DB.xml</DB_path> <!-- 数据库配置文件-->
</DB>
</env>
<record_epo>10</record_epo>
<num_episodes>500</num_episodes> <!-- 迭iter次数-->
<max_eps_episode>1</max_eps_episode>
<min_eps>0.1</min_eps>
<TARGET_UPDATE>3</TARGET_UPDATE>
</simulator>
运行simulator.py文件,即可启动训练过程。支持断点训练。每次运行会在/logs生成一个日志,可以查看每轮次训练的得分详情。并在/DataBase/experience目录下生成无人机轨迹。
训练过程:

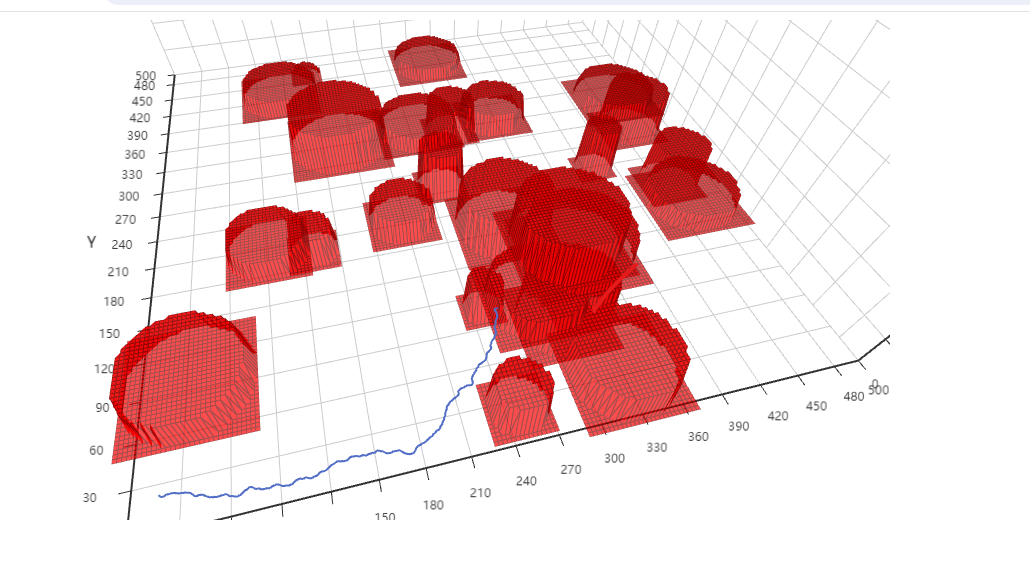
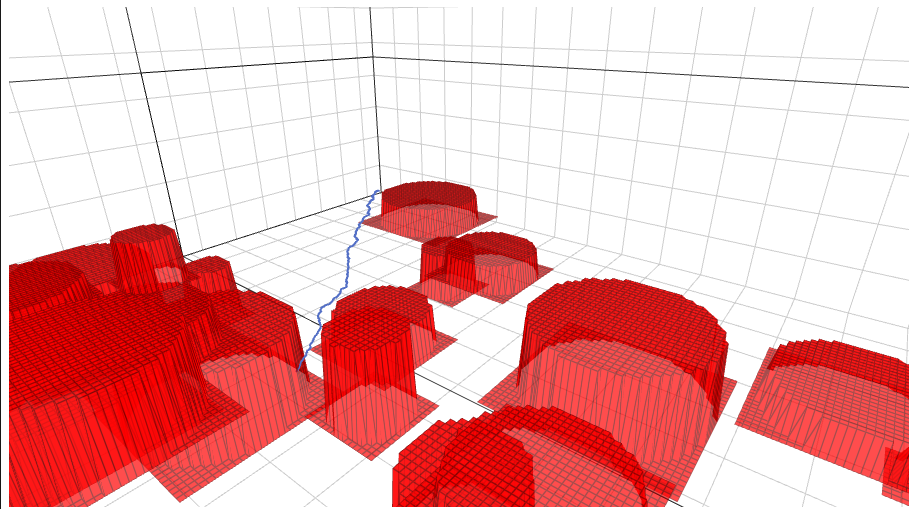
每个训练轮次生成的静态轨迹HTML
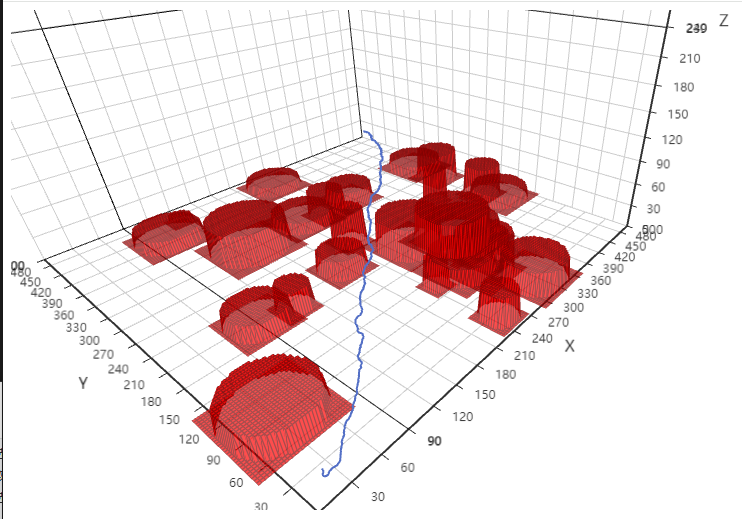
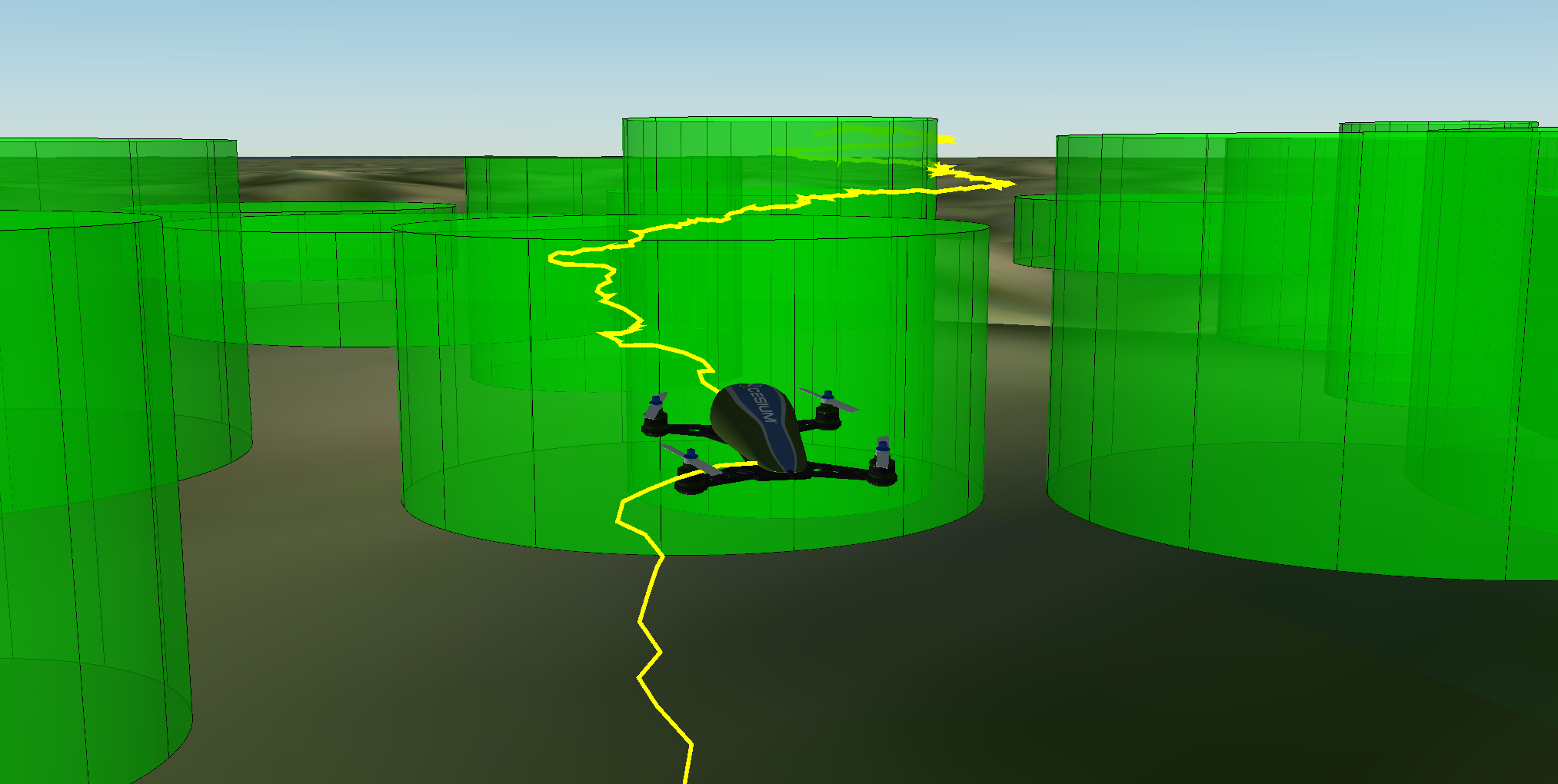
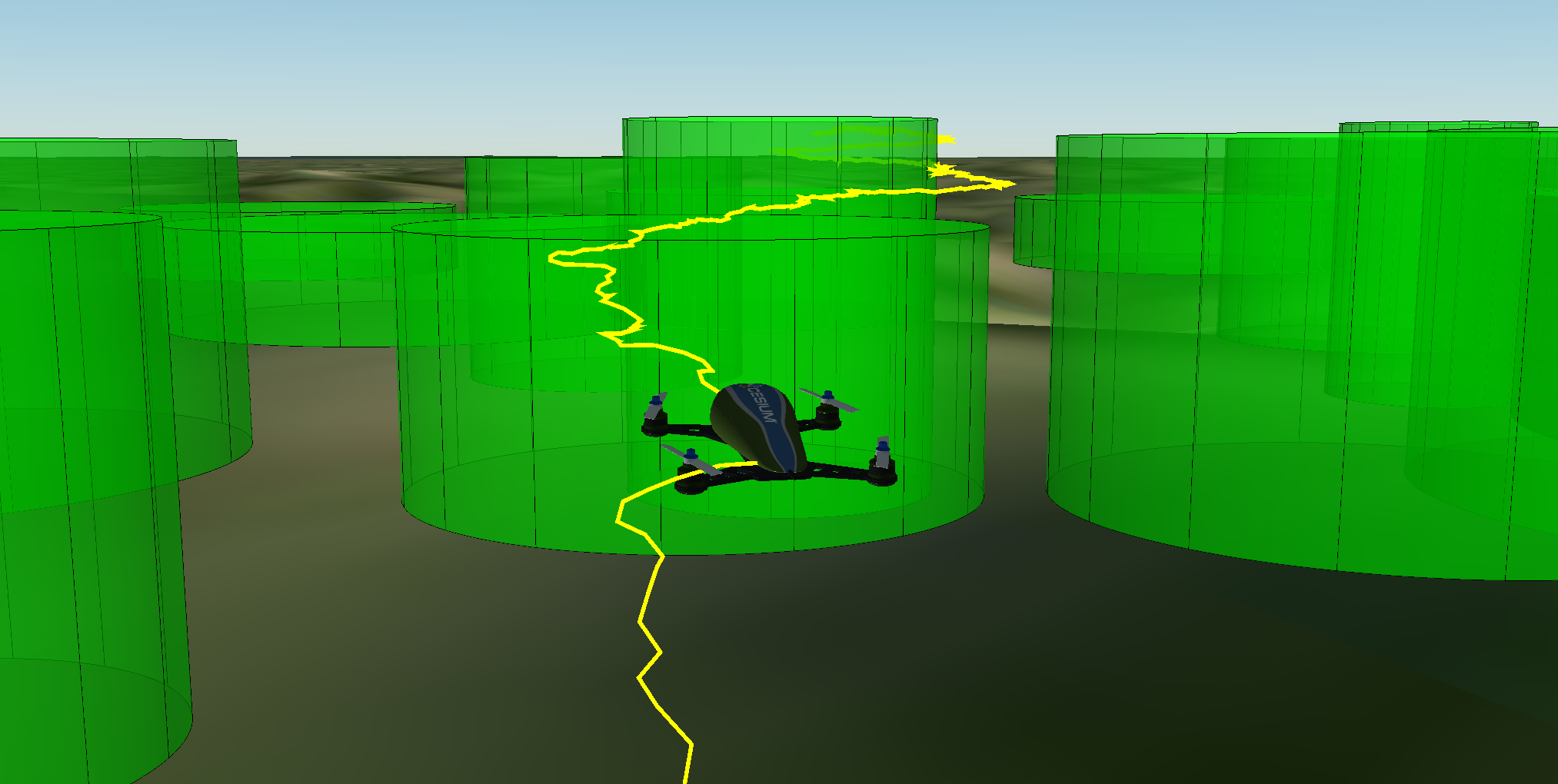
基于cesium的训练过程动态可视化

版本历史
basicVersion2024/05/25常见问题
相似工具推荐
openclaw
OpenClaw 是一款专为个人打造的本地化 AI 助手,旨在让你在自己的设备上拥有完全可控的智能伙伴。它打破了传统 AI 助手局限于特定网页或应用的束缚,能够直接接入你日常使用的各类通讯渠道,包括微信、WhatsApp、Telegram、Discord、iMessage 等数十种平台。无论你在哪个聊天软件中发送消息,OpenClaw 都能即时响应,甚至支持在 macOS、iOS 和 Android 设备上进行语音交互,并提供实时的画布渲染功能供你操控。 这款工具主要解决了用户对数据隐私、响应速度以及“始终在线”体验的需求。通过将 AI 部署在本地,用户无需依赖云端服务即可享受快速、私密的智能辅助,真正实现了“你的数据,你做主”。其独特的技术亮点在于强大的网关架构,将控制平面与核心助手分离,确保跨平台通信的流畅性与扩展性。 OpenClaw 非常适合希望构建个性化工作流的技术爱好者、开发者,以及注重隐私保护且不愿被单一生态绑定的普通用户。只要具备基础的终端操作能力(支持 macOS、Linux 及 Windows WSL2),即可通过简单的命令行引导完成部署。如果你渴望拥有一个懂你
stable-diffusion-webui
stable-diffusion-webui 是一个基于 Gradio 构建的网页版操作界面,旨在让用户能够轻松地在本地运行和使用强大的 Stable Diffusion 图像生成模型。它解决了原始模型依赖命令行、操作门槛高且功能分散的痛点,将复杂的 AI 绘图流程整合进一个直观易用的图形化平台。 无论是希望快速上手的普通创作者、需要精细控制画面细节的设计师,还是想要深入探索模型潜力的开发者与研究人员,都能从中获益。其核心亮点在于极高的功能丰富度:不仅支持文生图、图生图、局部重绘(Inpainting)和外绘(Outpainting)等基础模式,还独创了注意力机制调整、提示词矩阵、负向提示词以及“高清修复”等高级功能。此外,它内置了 GFPGAN 和 CodeFormer 等人脸修复工具,支持多种神经网络放大算法,并允许用户通过插件系统无限扩展能力。即使是显存有限的设备,stable-diffusion-webui 也提供了相应的优化选项,让高质量的 AI 艺术创作变得触手可及。
everything-claude-code
everything-claude-code 是一套专为 AI 编程助手(如 Claude Code、Codex、Cursor 等)打造的高性能优化系统。它不仅仅是一组配置文件,而是一个经过长期实战打磨的完整框架,旨在解决 AI 代理在实际开发中面临的效率低下、记忆丢失、安全隐患及缺乏持续学习能力等核心痛点。 通过引入技能模块化、直觉增强、记忆持久化机制以及内置的安全扫描功能,everything-claude-code 能显著提升 AI 在复杂任务中的表现,帮助开发者构建更稳定、更智能的生产级 AI 代理。其独特的“研究优先”开发理念和针对 Token 消耗的优化策略,使得模型响应更快、成本更低,同时有效防御潜在的攻击向量。 这套工具特别适合软件开发者、AI 研究人员以及希望深度定制 AI 工作流的技术团队使用。无论您是在构建大型代码库,还是需要 AI 协助进行安全审计与自动化测试,everything-claude-code 都能提供强大的底层支持。作为一个曾荣获 Anthropic 黑客大奖的开源项目,它融合了多语言支持与丰富的实战钩子(hooks),让 AI 真正成长为懂上
ComfyUI
ComfyUI 是一款功能强大且高度模块化的视觉 AI 引擎,专为设计和执行复杂的 Stable Diffusion 图像生成流程而打造。它摒弃了传统的代码编写模式,采用直观的节点式流程图界面,让用户通过连接不同的功能模块即可构建个性化的生成管线。 这一设计巧妙解决了高级 AI 绘图工作流配置复杂、灵活性不足的痛点。用户无需具备编程背景,也能自由组合模型、调整参数并实时预览效果,轻松实现从基础文生图到多步骤高清修复等各类复杂任务。ComfyUI 拥有极佳的兼容性,不仅支持 Windows、macOS 和 Linux 全平台,还广泛适配 NVIDIA、AMD、Intel 及苹果 Silicon 等多种硬件架构,并率先支持 SDXL、Flux、SD3 等前沿模型。 无论是希望深入探索算法潜力的研究人员和开发者,还是追求极致创作自由度的设计师与资深 AI 绘画爱好者,ComfyUI 都能提供强大的支持。其独特的模块化架构允许社区不断扩展新功能,使其成为当前最灵活、生态最丰富的开源扩散模型工具之一,帮助用户将创意高效转化为现实。
gemini-cli
gemini-cli 是一款由谷歌推出的开源 AI 命令行工具,它将强大的 Gemini 大模型能力直接集成到用户的终端环境中。对于习惯在命令行工作的开发者而言,它提供了一条从输入提示词到获取模型响应的最短路径,无需切换窗口即可享受智能辅助。 这款工具主要解决了开发过程中频繁上下文切换的痛点,让用户能在熟悉的终端界面内直接完成代码理解、生成、调试以及自动化运维任务。无论是查询大型代码库、根据草图生成应用,还是执行复杂的 Git 操作,gemini-cli 都能通过自然语言指令高效处理。 它特别适合广大软件工程师、DevOps 人员及技术研究人员使用。其核心亮点包括支持高达 100 万 token 的超长上下文窗口,具备出色的逻辑推理能力;内置 Google 搜索、文件操作及 Shell 命令执行等实用工具;更独特的是,它支持 MCP(模型上下文协议),允许用户灵活扩展自定义集成,连接如图像生成等外部能力。此外,个人谷歌账号即可享受免费的额度支持,且项目基于 Apache 2.0 协议完全开源,是提升终端工作效率的理想助手。
markitdown
MarkItDown 是一款由微软 AutoGen 团队打造的轻量级 Python 工具,专为将各类文件高效转换为 Markdown 格式而设计。它支持 PDF、Word、Excel、PPT、图片(含 OCR)、音频(含语音转录)、HTML 乃至 YouTube 链接等多种格式的解析,能够精准提取文档中的标题、列表、表格和链接等关键结构信息。 在人工智能应用日益普及的今天,大语言模型(LLM)虽擅长处理文本,却难以直接读取复杂的二进制办公文档。MarkItDown 恰好解决了这一痛点,它将非结构化或半结构化的文件转化为模型“原生理解”且 Token 效率极高的 Markdown 格式,成为连接本地文件与 AI 分析 pipeline 的理想桥梁。此外,它还提供了 MCP(模型上下文协议)服务器,可无缝集成到 Claude Desktop 等 LLM 应用中。 这款工具特别适合开发者、数据科学家及 AI 研究人员使用,尤其是那些需要构建文档检索增强生成(RAG)系统、进行批量文本分析或希望让 AI 助手直接“阅读”本地文件的用户。虽然生成的内容也具备一定可读性,但其核心优势在于为机器