Deep-Reinforcement-Learning-Algorithms-with-PyTorch
Deep-Reinforcement-Learning-Algorithms-with-PyTorch 是一个基于 PyTorch 框架构建的开源项目,旨在提供主流深度强化学习算法的高质量代码实现与环境模拟。它有效解决了研究人员和开发者在复现经典论文算法时面临的代码缺失、环境配置复杂以及基准测试不统一等痛点。
该项目非常适合人工智能领域的研究人员、算法工程师以及希望深入理解强化学习机制的学生使用。无论是需要快速验证新想法的科研人员,还是希望通过实战代码学习算法细节的开发者,都能从中获益。
其核心亮点在于覆盖面极广,不仅包含了 DQN 系列(如 Double DQN、Dueling DQN)、策略梯度方法(如 PPO、A3C、SAC、TD3)等经典算法,还前瞻性地集成了分层强化学习(Hierarchical RL)及带有事后经验回放(HER)的高级变体。此外,项目内置了比特翻转(Bit Flipping)、四房间游戏(Four Rooms)等多种专用测试环境,所有算法均经过验证,能够快速在 Cart Pole 或 Mountain Car 等标准任务中收敛。代码结构清晰且易于扩展,是探索深度强化学习前沿技术的理想起点。
使用场景
某自动驾驶初创公司的算法工程师团队,正致力于开发一套能在复杂动态环境中自主导航的机械臂控制系统。
没有 Deep-Reinforcement-Learning-Algorithms-with-PyTorch 时
- 重复造轮子耗时严重:团队需从零编写 DDPG、TD3 或 SAC 等复杂算法的底层代码,仅调试神经网络架构和奖励函数逻辑就耗费了数周时间。
- 难以复现前沿成果:面对论文中提到的“事后经验回放(HER)”或“分层强化学习”等技术,缺乏标准参考实现,导致实验结果不稳定且难以对齐理论性能。
- 环境适配成本高:针对连续动作空间(如机械臂抓取)和动态目标场景,自行构建测试环境极易出错,导致训练初期模型无法收敛。
- 算法选型试错困难:由于缺乏统一的对比框架,团队难以快速验证哪种算法(如 PPO 还是 A3C)更适合当前特定的控制任务。
使用 Deep-Reinforcement-Learning-Algorithms-with-PyTorch 后
- 即插即用加速研发:直接调用库中已优化的 TD3 和 SAC 实现,将核心算法部署时间从数周缩短至几天,让团队能专注于上层策略设计。
- 精准复现高级特性:利用内置的 DDPG-HER 和分层 DQN 模块,轻松实现了动态目标下的稀疏奖励学习,迅速达到了论文级别的收敛效果。
- 标准化环境验证:直接使用库中集成的 Ant-Maze 或 Fetch Reach 等高质量仿真环境,确保了连续控制任务在训练初期的稳定性和可复现性。
- 高效算法横向评测:在同一框架下快速切换并对比 PPO、A2C 及 Double DQN 等多种算法表现,迅速锁定了最适合机械臂控制的最优模型。
Deep-Reinforcement-Learning-Algorithms-with-PyTorch 通过提供生产级的算法实现与标准环境,将团队从繁琐的底层编码中解放出来,使其能专注于解决真实的机器人控制难题。
运行环境要求
- 未说明
未说明
未说明

快速开始
使用 PyTorch 的深度强化学习算法

![]()
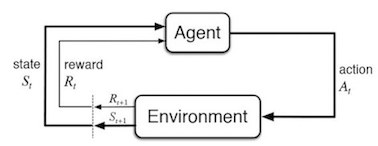

此仓库包含深度强化学习算法和环境的 PyTorch 实现。
(为了帮助你记住所学的机器学习知识,可以将其记录在 Gizmo 中)
已实现的算法
- 深度 Q 学习 (DQN) (Mnih 等人, 2013)
- 带有固定 Q 目标的 DQN (Mnih 等人, 2013)
- 双 DQN (DDQN) (Hado van Hasselt 等人, 2015)
- 带有优先级经验回放的 DDQN (Schaul 等人, 2016)
- 决斗式 DDQN (Wang 等人, 2016)
- REINFORCE (Williams 等人, 1992)
- 深度确定性策略梯度 (DDPG) (Lillicrap 等人, 2016)
- 孪生延迟深度确定性策略梯度 (TD3) (Fujimoto 等人, 2018)
- 软演员-评论家 (SAC) (Haarnoja 等人, 2018)
- 用于离散动作的软演员-评论家 (SAC-Discrete) (Christodoulou, 2019)
- 异步优势演员-评论家 (A3C) (Mnih 等人, 2016)
- 同步优势演员-评论家 (A2C)
- 近端策略优化 (PPO) (Schulman 等人, 2017)
- 带有事后经验回放的 DQN (DQN-HER) (Andrychowicz 等人, 2018)
- 带有事后经验回放的 DDPG (DDPG-HER) (Andrychowicz 等人, 2018)
- 层次化 DQN (h-DQN) (Kulkarni 等人, 2016)
- 用于层次化强化学习的随机神经网络 (SNN-HRL) (Florensa 等人, 2017)
- 多样性就是一切 (DIAYN) (Eyensbach 等人, 2018)
所有实现都能快速解决 Cart Pole(离散动作)、Mountain Car Continuous(连续动作)、Bit Flipping(具有动态目标的离散动作)或 Fetch Reach(具有动态目标的连续动作)。我计划很快添加更多层次化强化学习算法。
已实现的环境
- 位翻转游戏 (如 Andrychowicz 等人, 2018 所述)
- 四房间游戏 (如 Sutton 等人, 1998 所述)
- 长走廊游戏 (如 Kulkarni 等人, 2016 所述)
- Ant-{迷宫、推、摔} (如 Nachum 等人, 2018 及其配套 代码 所述)
结果
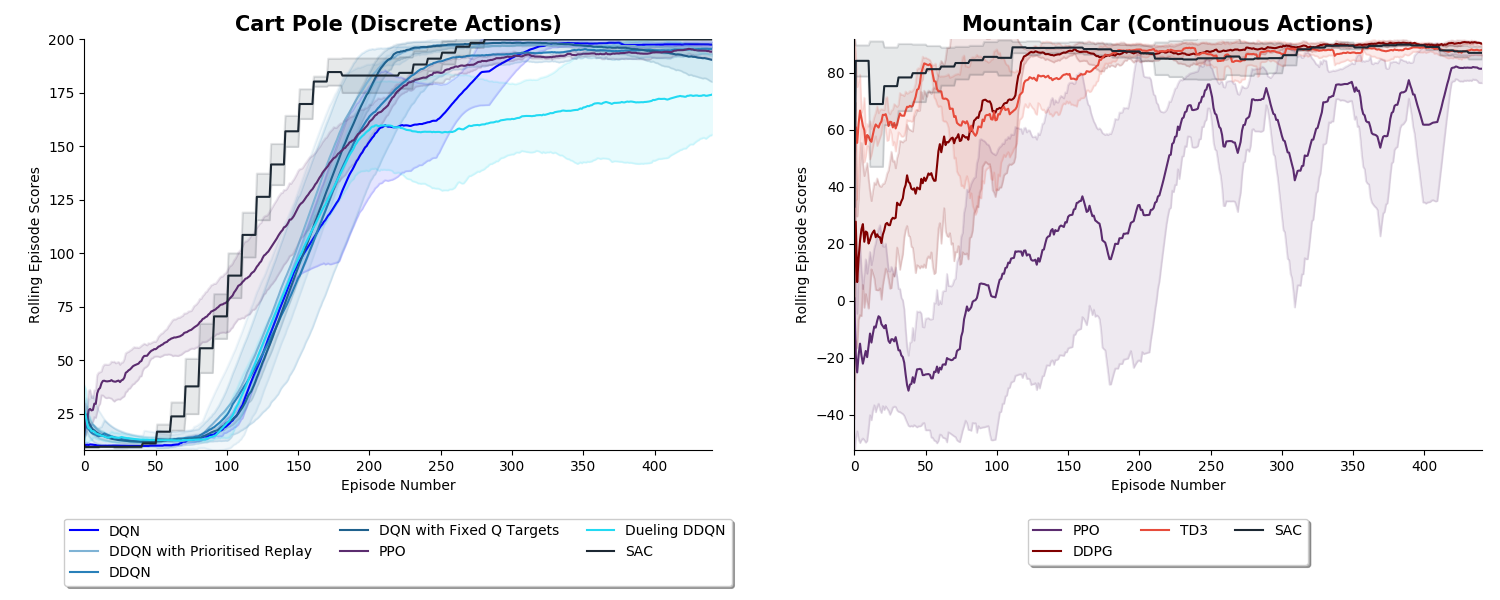
1. Cart Pole 和 Mountain Car
下图展示了各种强化学习算法成功学习离散动作游戏 Cart Pole 或连续动作游戏 Mountain Car。运行这些算法时使用了 3 个随机种子,图中阴影区域表示正负 1 个标准差。所使用的超参数可在 results/Cart_Pole.py 和 results/Mountain_Car.py 文件中找到。
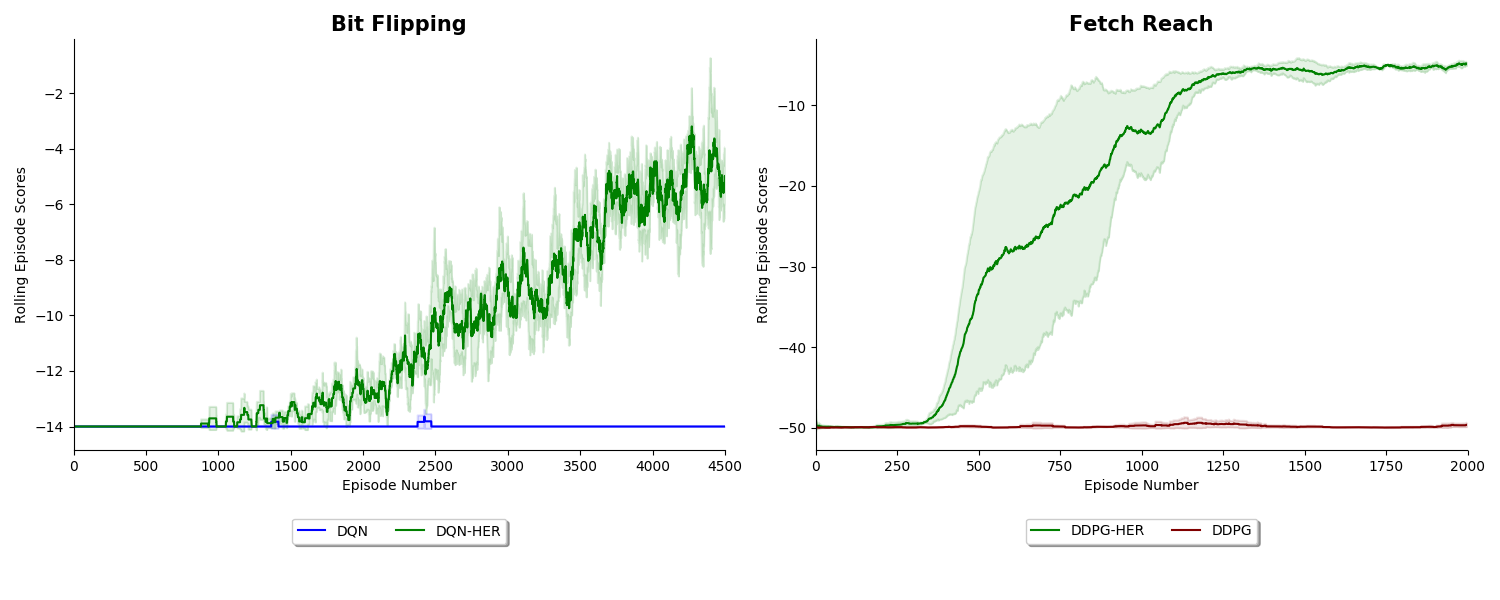
2. 事后经验回放 (HER) 实验
下图展示了 DQN 和 DDPG 在带有和不带事后经验回放 (HER) 的 Bit Flipping(14 位)和 Fetch Reach 环境中的表现。这些环境分别在 2018 年事后经验回放论文 和 2018 年多目标强化学习论文 中有所描述。实验结果与论文中的发现一致,表明引入 HER 可以使智能体解决原本无法解决的问题。请注意,每对智能体使用了相同的超参数,唯一的区别在于是否使用了事后经验回放。
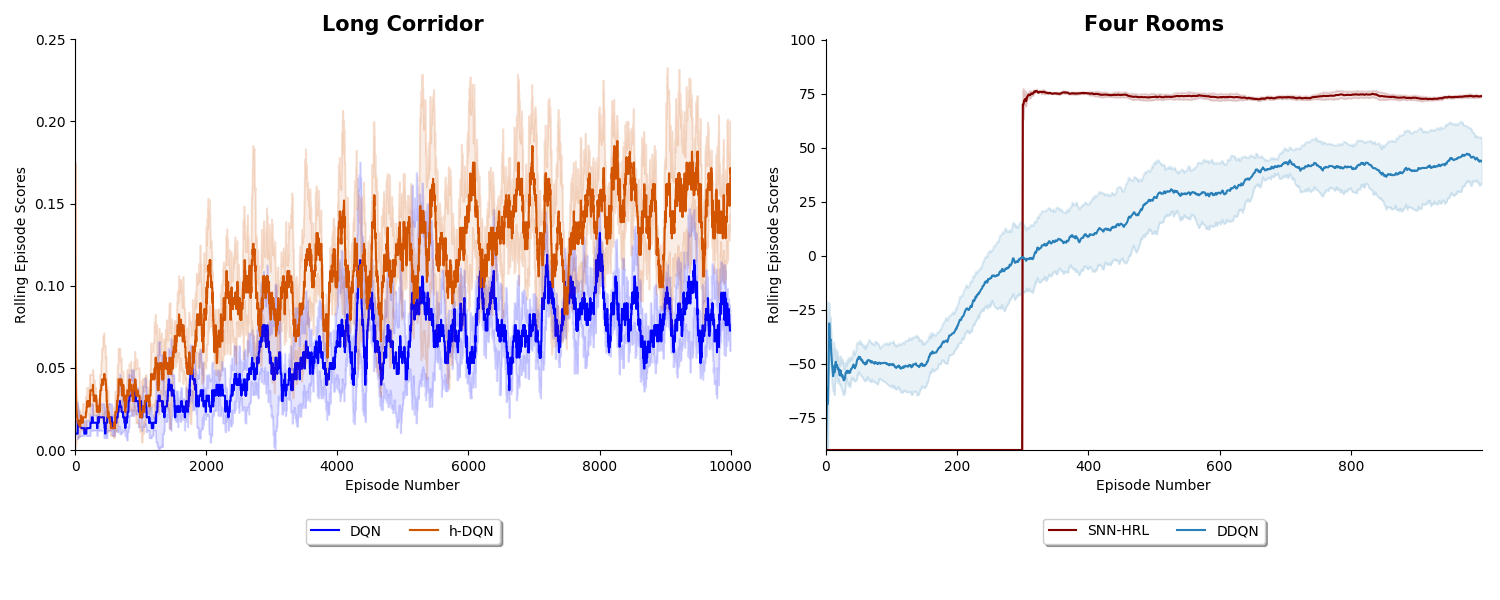
3. 层次化强化学习实验
左侧的结果展示了 DQN 和来自 Kulkarni 等人, 2016 的层次化 DQN 算法在同样由 Kulkarni 等人, 2016 解释的长走廊环境中表现。该环境要求智能体先到达走廊尽头再返回才能获得更大的奖励。这种延迟满足感和状态的混淆使得 DQN 很难学会这一任务。然而,如果我们引入一个元控制器(如 h-DQN 中所示),指导低层控制器的行为,就能取得更好的进展。这与论文中的结果相符。
右侧的结果展示了 DDQN 和来自 Florensa 等人, 2017 的用于层次化强化学习的随机神经网络 (SNN-HRL) 算法的表现。选择 DDQN 作为对比是因为 SNN-HRL 的实现内部使用了两个 DDQN 算法。需要注意的是,SNN-HRL 前 300 轮训练用于预训练,因此在这期间没有奖励。
使用方法
仓库的高层次结构如下:
├── agents
├── actor_critic_agents
├── DQN_agents
├── policy_gradient_agents
└── stochastic_policy_search_agents
├── environments
├── results
└── data_and_graphs
├── tests
├── utilities
└── data structures
i) 观看智能体学习上述游戏
要观看所有不同智能体学习 Cart Pole 任务,请按照以下步骤操作:
git clone https://github.com/p-christ/Deep_RL_Implementations.git
cd Deep_RL_Implementations
conda create --name myenvname
y
conda activate myenvname
pip3 install -r requirements.txt
python results/Cart_Pole.py
对于其他游戏,只需将最后一行代码改为 Results 文件夹中的其他文件即可。
ii) 在其他环境中训练智能体
大多数 OpenAI Gym 环境都适用。你只需要修改 config.environment 字段(可参考 Results/Cart_Pole.py 中的示例)。
此外,如果你创建了一个继承自 gym.Env 的自定义环境类,也可以使用自己的自定义游戏。请参阅 Environments/Four_Rooms_Environment.py 中的自定义环境示例,并查看脚本 Results/Four_Rooms.py 以了解如何让智能体在该环境中进行训练和测试。
常见问题
相似工具推荐
openclaw
OpenClaw 是一款专为个人打造的本地化 AI 助手,旨在让你在自己的设备上拥有完全可控的智能伙伴。它打破了传统 AI 助手局限于特定网页或应用的束缚,能够直接接入你日常使用的各类通讯渠道,包括微信、WhatsApp、Telegram、Discord、iMessage 等数十种平台。无论你在哪个聊天软件中发送消息,OpenClaw 都能即时响应,甚至支持在 macOS、iOS 和 Android 设备上进行语音交互,并提供实时的画布渲染功能供你操控。 这款工具主要解决了用户对数据隐私、响应速度以及“始终在线”体验的需求。通过将 AI 部署在本地,用户无需依赖云端服务即可享受快速、私密的智能辅助,真正实现了“你的数据,你做主”。其独特的技术亮点在于强大的网关架构,将控制平面与核心助手分离,确保跨平台通信的流畅性与扩展性。 OpenClaw 非常适合希望构建个性化工作流的技术爱好者、开发者,以及注重隐私保护且不愿被单一生态绑定的普通用户。只要具备基础的终端操作能力(支持 macOS、Linux 及 Windows WSL2),即可通过简单的命令行引导完成部署。如果你渴望拥有一个懂你
stable-diffusion-webui
stable-diffusion-webui 是一个基于 Gradio 构建的网页版操作界面,旨在让用户能够轻松地在本地运行和使用强大的 Stable Diffusion 图像生成模型。它解决了原始模型依赖命令行、操作门槛高且功能分散的痛点,将复杂的 AI 绘图流程整合进一个直观易用的图形化平台。 无论是希望快速上手的普通创作者、需要精细控制画面细节的设计师,还是想要深入探索模型潜力的开发者与研究人员,都能从中获益。其核心亮点在于极高的功能丰富度:不仅支持文生图、图生图、局部重绘(Inpainting)和外绘(Outpainting)等基础模式,还独创了注意力机制调整、提示词矩阵、负向提示词以及“高清修复”等高级功能。此外,它内置了 GFPGAN 和 CodeFormer 等人脸修复工具,支持多种神经网络放大算法,并允许用户通过插件系统无限扩展能力。即使是显存有限的设备,stable-diffusion-webui 也提供了相应的优化选项,让高质量的 AI 艺术创作变得触手可及。
everything-claude-code
everything-claude-code 是一套专为 AI 编程助手(如 Claude Code、Codex、Cursor 等)打造的高性能优化系统。它不仅仅是一组配置文件,而是一个经过长期实战打磨的完整框架,旨在解决 AI 代理在实际开发中面临的效率低下、记忆丢失、安全隐患及缺乏持续学习能力等核心痛点。 通过引入技能模块化、直觉增强、记忆持久化机制以及内置的安全扫描功能,everything-claude-code 能显著提升 AI 在复杂任务中的表现,帮助开发者构建更稳定、更智能的生产级 AI 代理。其独特的“研究优先”开发理念和针对 Token 消耗的优化策略,使得模型响应更快、成本更低,同时有效防御潜在的攻击向量。 这套工具特别适合软件开发者、AI 研究人员以及希望深度定制 AI 工作流的技术团队使用。无论您是在构建大型代码库,还是需要 AI 协助进行安全审计与自动化测试,everything-claude-code 都能提供强大的底层支持。作为一个曾荣获 Anthropic 黑客大奖的开源项目,它融合了多语言支持与丰富的实战钩子(hooks),让 AI 真正成长为懂上
ComfyUI
ComfyUI 是一款功能强大且高度模块化的视觉 AI 引擎,专为设计和执行复杂的 Stable Diffusion 图像生成流程而打造。它摒弃了传统的代码编写模式,采用直观的节点式流程图界面,让用户通过连接不同的功能模块即可构建个性化的生成管线。 这一设计巧妙解决了高级 AI 绘图工作流配置复杂、灵活性不足的痛点。用户无需具备编程背景,也能自由组合模型、调整参数并实时预览效果,轻松实现从基础文生图到多步骤高清修复等各类复杂任务。ComfyUI 拥有极佳的兼容性,不仅支持 Windows、macOS 和 Linux 全平台,还广泛适配 NVIDIA、AMD、Intel 及苹果 Silicon 等多种硬件架构,并率先支持 SDXL、Flux、SD3 等前沿模型。 无论是希望深入探索算法潜力的研究人员和开发者,还是追求极致创作自由度的设计师与资深 AI 绘画爱好者,ComfyUI 都能提供强大的支持。其独特的模块化架构允许社区不断扩展新功能,使其成为当前最灵活、生态最丰富的开源扩散模型工具之一,帮助用户将创意高效转化为现实。
gemini-cli
gemini-cli 是一款由谷歌推出的开源 AI 命令行工具,它将强大的 Gemini 大模型能力直接集成到用户的终端环境中。对于习惯在命令行工作的开发者而言,它提供了一条从输入提示词到获取模型响应的最短路径,无需切换窗口即可享受智能辅助。 这款工具主要解决了开发过程中频繁上下文切换的痛点,让用户能在熟悉的终端界面内直接完成代码理解、生成、调试以及自动化运维任务。无论是查询大型代码库、根据草图生成应用,还是执行复杂的 Git 操作,gemini-cli 都能通过自然语言指令高效处理。 它特别适合广大软件工程师、DevOps 人员及技术研究人员使用。其核心亮点包括支持高达 100 万 token 的超长上下文窗口,具备出色的逻辑推理能力;内置 Google 搜索、文件操作及 Shell 命令执行等实用工具;更独特的是,它支持 MCP(模型上下文协议),允许用户灵活扩展自定义集成,连接如图像生成等外部能力。此外,个人谷歌账号即可享受免费的额度支持,且项目基于 Apache 2.0 协议完全开源,是提升终端工作效率的理想助手。
markitdown
MarkItDown 是一款由微软 AutoGen 团队打造的轻量级 Python 工具,专为将各类文件高效转换为 Markdown 格式而设计。它支持 PDF、Word、Excel、PPT、图片(含 OCR)、音频(含语音转录)、HTML 乃至 YouTube 链接等多种格式的解析,能够精准提取文档中的标题、列表、表格和链接等关键结构信息。 在人工智能应用日益普及的今天,大语言模型(LLM)虽擅长处理文本,却难以直接读取复杂的二进制办公文档。MarkItDown 恰好解决了这一痛点,它将非结构化或半结构化的文件转化为模型“原生理解”且 Token 效率极高的 Markdown 格式,成为连接本地文件与 AI 分析 pipeline 的理想桥梁。此外,它还提供了 MCP(模型上下文协议)服务器,可无缝集成到 Claude Desktop 等 LLM 应用中。 这款工具特别适合开发者、数据科学家及 AI 研究人员使用,尤其是那些需要构建文档检索增强生成(RAG)系统、进行批量文本分析或希望让 AI 助手直接“阅读”本地文件的用户。虽然生成的内容也具备一定可读性,但其核心优势在于为机器