pylot
Pylot 是一款模块化的自动驾驶开发平台,旨在帮助开发者在 CARLA 仿真环境或真实车辆上高效构建与测试自动驾驶系统。它主要解决了自动驾驶算法从理论验证到实际部署过程中,缺乏统一、灵活且可复现测试框架的痛点,让用户能够轻松集成感知、预测、规划及控制等核心环节。
这款工具特别适合自动驾驶领域的研究人员、算法工程师以及高校学生使用。无论是需要快速原型验证的学术团队,还是致力于技术落地的企业开发者,都能通过 Pylot 获得标准化的实验环境。其独特的技术亮点在于基于 ERDOS 操作符架构设计,将障碍物检测、车道线识别、交通灯判断等功能拆分为独立模块。这种设计不仅支持组件单独调试,还能灵活组合成完整流水线,极大提升了开发效率。此外,Pylot 提供了便捷的 Docker 部署方案,内置仿真器与依赖环境,显著降低了配置门槛,让用户能更专注于算法本身的优化与创新。
使用场景
某自动驾驶初创团队正在为城市复杂路口开发新的感知与规划算法,急需在低成本环境下验证多模块协同效果。
没有 pylot 时
- 仿真环境搭建繁琐:团队需手动整合 CARLA 模拟器与各类深度学习模型,配置依赖库耗时数天且极易出错。
- 模块测试割裂:感知、预测和规划组件往往独立开发,缺乏统一框架进行端到端联调,难以发现系统级延迟或数据不同步问题。
- 实车验证风险高:未经充分仿真验证的算法直接上车测试,不仅成本高昂,且在复杂交通场景下存在安全隐患。
- 可视化调试困难:缺乏内置的可视化工具,开发者难以直观观察障碍物检测框、车道线拟合等中间结果,排查 Bug 如同“盲人摸象”。
使用 pylot 后
- 一键部署仿真平台:通过 Pylot 提供的 Docker 镜像,团队几分钟内即可启动集成好 CARLA 和完整算法栈的开发环境。
- 模块化流水线协同:利用 Pylot 基于 ERDOS 构建的算子架构,感知、跟踪、预测及规划模块可无缝串联,轻松实现全链路闭环测试。
- 安全高效的迭代循环:先在 Pylot 支持的 CARLA 高保真场景中完成极端工况(如鬼探头、恶劣天气)验证,再部署实车,大幅降低试错成本与风险。
- 实时可视化反馈:借助 Pylot 的 X11 转发功能,开发人员能实时看到障碍物检测框与语义分割图,快速定位算法失效原因并优化参数。
Pylot 通过提供模块化、可可视化的端到端仿真平台,将自动驾驶算法的研发周期从数周缩短至数天,显著提升了迭代效率与安全性。
运行环境要求
- Linux
必需 NVIDIA GPU (需安装 nvidia-docker),具体型号和显存未说明
未说明

快速开始
![]()

Pylot 是一个用于开发和测试自动驾驶车辆组件(例如感知、预测、规划)的平台,可在 CARLA 模拟器和真实世界车辆上运行。
设置说明
使用 Docker 部署
运行 Pylot 最简单的方式是使用我们的 Docker 镜像。在开始安装 Pylot 之前,请确保您的机器上已安装 nvidia-docker。如果没有安装 nvidia-docker,请运行 ./scripts/install-nvidia-docker.sh。
我们提供了一个包含 Pylot 和 CARLA 的预配置 Docker 镜像。
docker pull erdosproject/pylot
nvidia-docker run -itd --name pylot -p 20022:22 erdosproject/pylot /bin/bash
接下来,在容器中启动模拟器:
nvidia-docker exec -i -t pylot /home/erdos/workspace/pylot/scripts/run_simulator.sh
最后,在容器中启动 Pylot:
nvidia-docker exec -i -t pylot /bin/bash
cd ~/workspace/pylot/
python3 pylot.py --flagfile=configs/detection.conf
可视化组件输出
如果您希望可视化不同组件的输出(例如边界框),则需要将 X 显示转发到容器中。首先,将您的公钥添加到容器中的 ~/.ssh/authorized_keys 文件中:
nvidia-docker cp ~/.ssh/id_rsa.pub pylot:/home/erdos/.ssh/authorized_keys
nvidia-docker exec -i -t pylot sudo chown erdos /home/erdos/.ssh/authorized_keys
nvidia-docker exec -i -t pylot sudo service ssh start
最后,通过 X 转发登录到容器:
ssh -p 20022 -X erdos@localhost
cd /home/erdos/workspace/pylot/
python3 pylot.py --flagfile=configs/detection.conf --visualize_detected_obstacles
如果一切正常,您应该能够看到如下所示的可视化效果:

手动安装说明
或者,您也可以通过以下步骤在本地系统上安装 Pylot:
./install.sh
pip install -e ./
接下来,启动模拟器:
export CARLA_HOME=$PYLOT_HOME/dependencies/CARLA_0.9.10.1/
./scripts/run_simulator.sh
在另一个终端中,设置路径:
export CARLA_HOME=$PYLOT_HOME/dependencies/CARLA_0.9.10.1/
cd $PYLOT_HOME/scripts/
source ./set_pythonpath.sh
最后,运行 Pylot:
cd $PYLOT_HOME/
python3 pylot.py --flagfile=configs/detection.conf
Pylot 组件
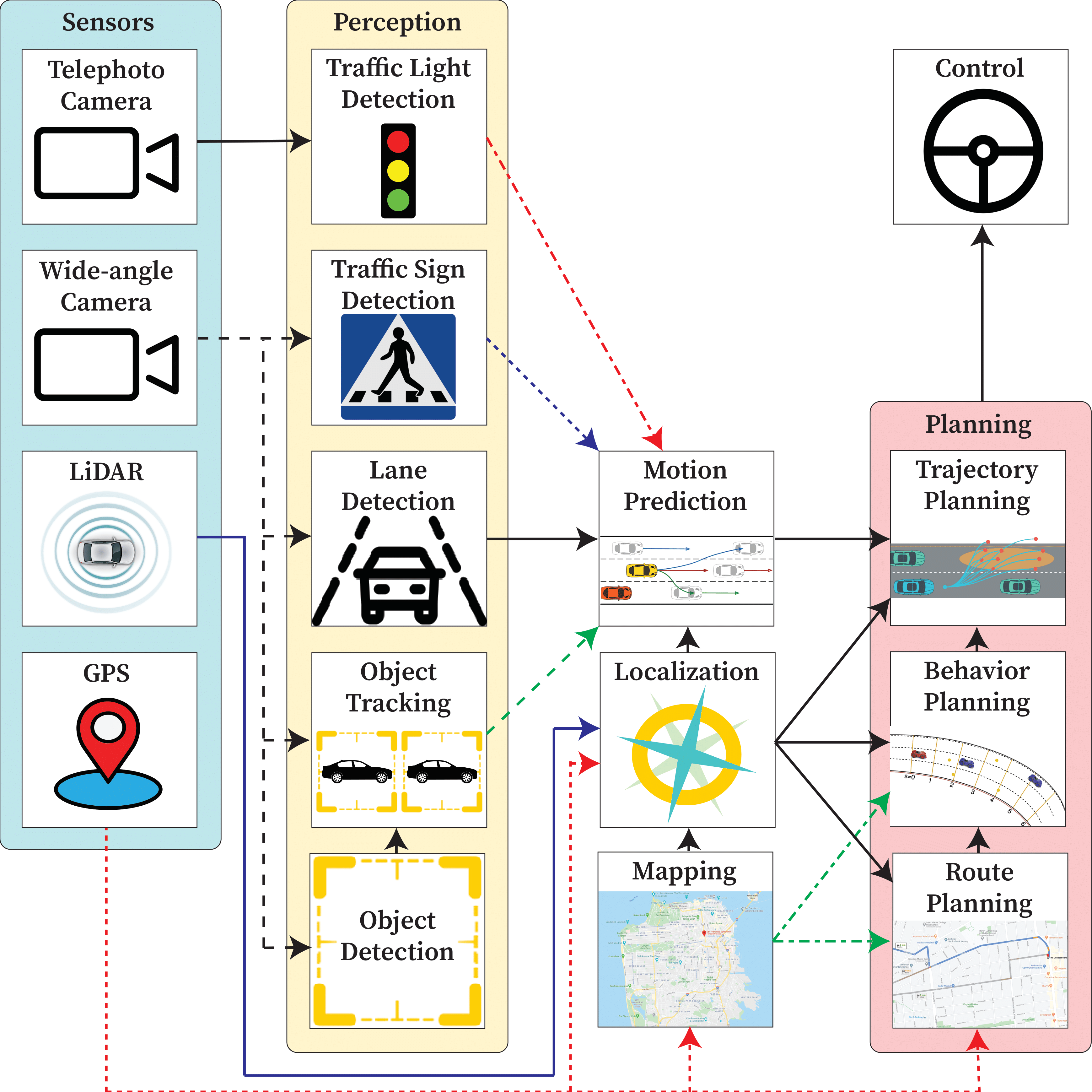
Pylot 包含多个组件:障碍物检测、交通信号灯检测、车道检测、障碍物跟踪、定位、分割、融合、预测、规划器和控制。每个组件都由一个或多个 ERDOS 算子实现,可以单独运行,也可以与整个 Pylot 应用程序一起运行。有关更详细的描述,请参阅 文档。
运行以下命令以查看所有组件以及 Pylot 驾驶策略的演示:
python3 pylot.py --flagfile=configs/demo.conf
该演示将执行:障碍物检测、交通信号灯检测、分割、预测、规划以及驾驶策略。
您也可以单独运行各个组件:
障碍物检测
Pylot 支持三种目标检测模型:frcnn_resnet101、ssd-mobilenet-fpn-640 和 ssdlite-mobilenet-v2。以下命令可单独运行检测器:
python3 pylot.py --flagfile=configs/detection.conf
如果您想评估检测器性能(即计算 mAP),可以运行:
python3 pylot.py --flagfile=configs/detection.conf --evaluate_obstacle_detection
如果您对我们的障碍物检测器精度不满意,可以运行其完美版本:
python3 pylot.py --flagfile=configs/perfect_detection.conf
如果检测器未能达到您期望的频率,或者您希望跨帧跟踪障碍物,可以结合检测器和跟踪器运行:
python3 pylot.py --flagfile=configs/tracking.conf
交通信号灯检测
Pylot 使用独立的组件进行交通信号灯的检测和分类。以下命令可单独运行该组件:
python3 pylot.py --flagfile=configs/traffic_light.conf
如果您需要更高的精度,可以通过传递 --perfect_traffic_light_detection 标志来运行完美版交通信号灯检测。
车道检测
python3 pylot.py --flagfile=configs/lane_detection.conf
障碍物跟踪
python3 pylot.py --flagfile=configs/tracking.conf
分割
要单独运行 Pylot 的分割组件,请执行以下命令:
python3 pylot.py --flagfile=configs/segmentation.conf
同样地,如果您希望获得理想的像素语义分割,可以传递 --perfect_segmentation 标志。
预测
Pylot 提供一个简单的线性预测组件:
python3 pylot.py --flagfile=configs/prediction.conf
规划
规划组件提供两种规划选项,可通过 --planning_type 标志指定:
waypoint:一种简单的规划器,遵循预定义的航点。这些航点可以是预先指定的,也可以使用 CARLA 模拟器地图中的 A* 规划器计算得出。该规划器会确保自车遵守交通信号灯规则,并在前方有障碍物时停车,但不执行避障操作。frenet_optimal_trajectory:Frenet 最优轨迹规划器。rrt_star:快速随机树规划器。hybrid_astar:混合 A* 规划器。
# 运行 Frenet 最优轨迹规划器。
python3 pylot.py --flagfile=configs/frenet_optimal_trajectory_planner.conf
# 运行 RRT* 规划器。
python3 pylot.py --flagfile=configs/rrt_star_planner.conf
# 运行混合 A* 规划器。
python3 pylot.py --flagfile=configs/hybrid_astar_planner.conf
控制
Pylot 支持三种控制器,可以通过 control 标志来指定:
pid:使用 PID 控制器跟踪由规划组件计算出的航点。mpc:使用模型预测控制来实现速度控制和航点跟踪。simulator_auto_pilot:使用模拟器自动驾驶仪沿着预定义路线行驶。该控制器独立于其他组件的输出运行。
你可以通过以下命令运行所有组件以及其中一种策略:
# 使用我们实现的算法和训练的模型运行所有组件:
python3 pylot.py --flagfile=configs/e2e.conf
# 运行 MPC:
python3 pylot.py --flagfile=configs/mpc.conf
# 运行模拟器自动驾驶仪:
python3 pylot.py --control=simulator_auto_pilot
调试日志
如果你需要调试应用程序,可以通过在命令中添加 --log_file_name=pylot.log --v=1 来启用额外的日志记录。
数据收集
Pylot 还提供了一个用于收集 CARLA 数据的脚本,包括:RGB 图像、分割图像、障碍物 2D 边界框、深度帧、点云、交通信号灯、障碍物轨迹以及 Chauffeur 格式的数据。
运行 python3 data_gatherer.py --help 可以查看可以收集哪些数据。或者,你也可以查看这个
配置文件
以了解数据收集设置的示例。
构建你自己的 Docker 镜像
如果你想基于最新代码构建自己的镜像,可以执行以下命令:
cd docker
./build_images.sh
该脚本会创建两个 Docker 镜像:一个包含 CARLA 模拟器,另一个包含 ERDOS 和 Pylot。
CARLA 自动驾驶挑战赛
Pylot 也可以用作在 CARLA 的 Leaderboard(排行榜)路线上运行的基线。我们提供了一个智能体,它为感知(例如检测、跟踪)、定位(扩展卡尔曼滤波器)、预测、规划(例如航点跟踪器、Frenet 最优轨迹、RRT*、Hybrid A*)和控制提供了参考实现。
要测试这个智能体,你可以拉取我们已经安装好所有必要软件的镜像:
docker pull erdosproject/pylot-carla-challenge
nvidia-docker run -itd --name pylot-challenge -p 20022:22 erdosproject/pylot-carla-challenge /bin/bash
或者,你也可以按照以下步骤手动在你的机器上安装依赖项:
mkdir challenge
export CHALLENGE_ROOT=`pwd`
# 克隆挑战赛排行榜仓库。
git clone -b stable --single-branch https://github.com/carla-simulator/leaderboard.git
export LEADERBOARD_ROOT=${CHALLENGE_ROOT}/leaderboard/
cd ${LEADERBOARD_ROOT} ; pip3 install -r requirements.txt ; cd ${CHALLENGE_ROOT}
# 克隆 CARLA 场景运行器仓库。这是排行榜所使用的。
git clone -b leaderboard --single-branch https://github.com/carla-simulator/scenario_runner.git
export SCENARIO_RUNNER_ROOT=${CHALLENGE_ROOT}/scenario_runner/
cd ${SCENARIO_RUNNER_ROOT} ; pip3 install -r requirements.txt ; cd ${CHALLENGE_ROOT}
# 切换到 CARLA 挑战分支。
cd ${PYLOT_HOME} ; git checkout -b challenge origin/challenge
export CARLA_ROOT=CARLA 0.9.10.1 的路径。
cd ${CHALLENGE_ROOT}
export TEAM_CODE_ROOT=${PYLOT_HOME} ; ${LEADERBOARD_ROOT}/scripts/make_docker.sh
关于 Pylot CARLA 挑战赛智能体的说明
与常规 Pylot 类似,挑战赛智能体 不仅连接了不同的参考实现,还提供了在不同配置下测试它们的选项(例如,在完美感知条件下测试预测、规划和控制)。这可以通过根据 Pylot 文档中的规范修改 挑战配置文件 中的标志来实现。
更多信息
欲了解更多关于 Pylot 背后的理念,请参阅我们的论文, 《Pylot:一个用于探索自动驾驶车辆延迟-精度权衡的模块化平台》(IEEE)(arXiv)。 如果你认为 Pylot 对你的工作有帮助,请按以下方式引用我们的论文:
@inproceedings{gog2021pylot,
title={Pylot: A modular platform for exploring latency-accuracy tradeoffs in autonomous vehicles},
author={Gog, Ionel and Kalra, Sukrit and Schafhalter, Peter and Wright, Matthew A and Gonzalez, Joseph E and Stoica, Ion},
booktitle={2021 IEEE International Conference on Robotics and Automation (ICRA)},
pages={8806--8813},
year={2021},
organization={IEEE}
}
参与方式
- Slack 社区:加入我们的 Slack 社区,参与开发讨论、使用问题交流以及功能请求。
- Github Issues:用于报告 bug。
版本历史
v0.3.3-eurosys2022/03/10v0.3.32021/09/29v0.3.22021/03/31v0.3.12020/11/12v0.3.02020/07/22v0.2.02020/01/20常见问题
相似工具推荐
openclaw
OpenClaw 是一款专为个人打造的本地化 AI 助手,旨在让你在自己的设备上拥有完全可控的智能伙伴。它打破了传统 AI 助手局限于特定网页或应用的束缚,能够直接接入你日常使用的各类通讯渠道,包括微信、WhatsApp、Telegram、Discord、iMessage 等数十种平台。无论你在哪个聊天软件中发送消息,OpenClaw 都能即时响应,甚至支持在 macOS、iOS 和 Android 设备上进行语音交互,并提供实时的画布渲染功能供你操控。 这款工具主要解决了用户对数据隐私、响应速度以及“始终在线”体验的需求。通过将 AI 部署在本地,用户无需依赖云端服务即可享受快速、私密的智能辅助,真正实现了“你的数据,你做主”。其独特的技术亮点在于强大的网关架构,将控制平面与核心助手分离,确保跨平台通信的流畅性与扩展性。 OpenClaw 非常适合希望构建个性化工作流的技术爱好者、开发者,以及注重隐私保护且不愿被单一生态绑定的普通用户。只要具备基础的终端操作能力(支持 macOS、Linux 及 Windows WSL2),即可通过简单的命令行引导完成部署。如果你渴望拥有一个懂你
stable-diffusion-webui
stable-diffusion-webui 是一个基于 Gradio 构建的网页版操作界面,旨在让用户能够轻松地在本地运行和使用强大的 Stable Diffusion 图像生成模型。它解决了原始模型依赖命令行、操作门槛高且功能分散的痛点,将复杂的 AI 绘图流程整合进一个直观易用的图形化平台。 无论是希望快速上手的普通创作者、需要精细控制画面细节的设计师,还是想要深入探索模型潜力的开发者与研究人员,都能从中获益。其核心亮点在于极高的功能丰富度:不仅支持文生图、图生图、局部重绘(Inpainting)和外绘(Outpainting)等基础模式,还独创了注意力机制调整、提示词矩阵、负向提示词以及“高清修复”等高级功能。此外,它内置了 GFPGAN 和 CodeFormer 等人脸修复工具,支持多种神经网络放大算法,并允许用户通过插件系统无限扩展能力。即使是显存有限的设备,stable-diffusion-webui 也提供了相应的优化选项,让高质量的 AI 艺术创作变得触手可及。
everything-claude-code
everything-claude-code 是一套专为 AI 编程助手(如 Claude Code、Codex、Cursor 等)打造的高性能优化系统。它不仅仅是一组配置文件,而是一个经过长期实战打磨的完整框架,旨在解决 AI 代理在实际开发中面临的效率低下、记忆丢失、安全隐患及缺乏持续学习能力等核心痛点。 通过引入技能模块化、直觉增强、记忆持久化机制以及内置的安全扫描功能,everything-claude-code 能显著提升 AI 在复杂任务中的表现,帮助开发者构建更稳定、更智能的生产级 AI 代理。其独特的“研究优先”开发理念和针对 Token 消耗的优化策略,使得模型响应更快、成本更低,同时有效防御潜在的攻击向量。 这套工具特别适合软件开发者、AI 研究人员以及希望深度定制 AI 工作流的技术团队使用。无论您是在构建大型代码库,还是需要 AI 协助进行安全审计与自动化测试,everything-claude-code 都能提供强大的底层支持。作为一个曾荣获 Anthropic 黑客大奖的开源项目,它融合了多语言支持与丰富的实战钩子(hooks),让 AI 真正成长为懂上
opencode
OpenCode 是一款开源的 AI 编程助手(Coding Agent),旨在像一位智能搭档一样融入您的开发流程。它不仅仅是一个代码补全插件,而是一个能够理解项目上下文、自主规划任务并执行复杂编码操作的智能体。无论是生成全新功能、重构现有代码,还是排查难以定位的 Bug,OpenCode 都能通过自然语言交互高效完成,显著减少开发者在重复性劳动和上下文切换上的时间消耗。 这款工具专为软件开发者、工程师及技术研究人员设计,特别适合希望利用大模型能力来提升编码效率、加速原型开发或处理遗留代码维护的专业人群。其核心亮点在于完全开源的架构,这意味着用户可以审查代码逻辑、自定义行为策略,甚至私有化部署以保障数据安全,彻底打破了传统闭源 AI 助手的“黑盒”限制。 在技术体验上,OpenCode 提供了灵活的终端界面(Terminal UI)和正在测试中的桌面应用程序,支持 macOS、Windows 及 Linux 全平台。它兼容多种包管理工具,安装便捷,并能无缝集成到现有的开发环境中。无论您是追求极致控制权的资深极客,还是渴望提升产出的独立开发者,OpenCode 都提供了一个透明、可信
ComfyUI
ComfyUI 是一款功能强大且高度模块化的视觉 AI 引擎,专为设计和执行复杂的 Stable Diffusion 图像生成流程而打造。它摒弃了传统的代码编写模式,采用直观的节点式流程图界面,让用户通过连接不同的功能模块即可构建个性化的生成管线。 这一设计巧妙解决了高级 AI 绘图工作流配置复杂、灵活性不足的痛点。用户无需具备编程背景,也能自由组合模型、调整参数并实时预览效果,轻松实现从基础文生图到多步骤高清修复等各类复杂任务。ComfyUI 拥有极佳的兼容性,不仅支持 Windows、macOS 和 Linux 全平台,还广泛适配 NVIDIA、AMD、Intel 及苹果 Silicon 等多种硬件架构,并率先支持 SDXL、Flux、SD3 等前沿模型。 无论是希望深入探索算法潜力的研究人员和开发者,还是追求极致创作自由度的设计师与资深 AI 绘画爱好者,ComfyUI 都能提供强大的支持。其独特的模块化架构允许社区不断扩展新功能,使其成为当前最灵活、生态最丰富的开源扩散模型工具之一,帮助用户将创意高效转化为现实。
gemini-cli
gemini-cli 是一款由谷歌推出的开源 AI 命令行工具,它将强大的 Gemini 大模型能力直接集成到用户的终端环境中。对于习惯在命令行工作的开发者而言,它提供了一条从输入提示词到获取模型响应的最短路径,无需切换窗口即可享受智能辅助。 这款工具主要解决了开发过程中频繁上下文切换的痛点,让用户能在熟悉的终端界面内直接完成代码理解、生成、调试以及自动化运维任务。无论是查询大型代码库、根据草图生成应用,还是执行复杂的 Git 操作,gemini-cli 都能通过自然语言指令高效处理。 它特别适合广大软件工程师、DevOps 人员及技术研究人员使用。其核心亮点包括支持高达 100 万 token 的超长上下文窗口,具备出色的逻辑推理能力;内置 Google 搜索、文件操作及 Shell 命令执行等实用工具;更独特的是,它支持 MCP(模型上下文协议),允许用户灵活扩展自定义集成,连接如图像生成等外部能力。此外,个人谷歌账号即可享受免费的额度支持,且项目基于 Apache 2.0 协议完全开源,是提升终端工作效率的理想助手。