Diff4RLSurvey
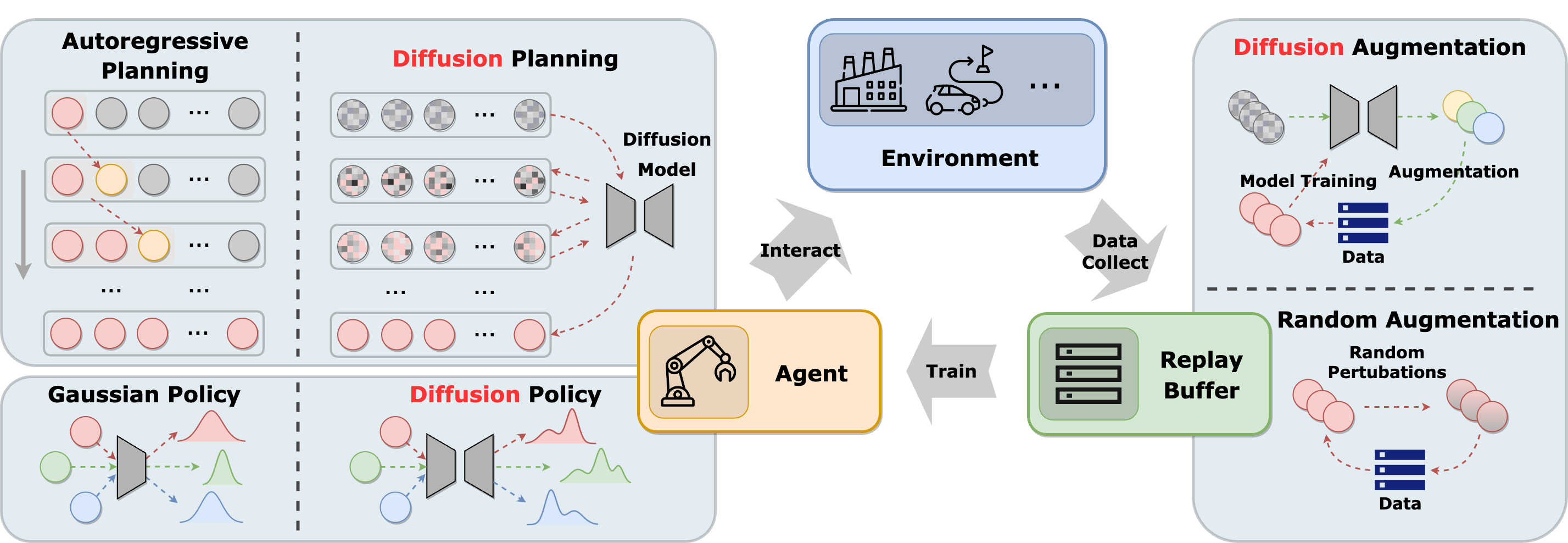
Diff4RLSurvey 是一个专注于“扩散模型在强化学习中应用”的开源资源库,旨在为研究人员和开发者提供该前沿领域的系统性指引。随着扩散模型在图像生成领域取得巨大成功,如何将其强大的序列建模能力迁移到复杂的决策任务中,成为学术界关注的热点,但相关研究分散且难以追踪。Diff4RLSurvey 通过整理配套综述论文《Diffusion Models for Reinforcement Learning: A Survey》,有效解决了这一信息碎片化问题。
该资源库不仅收录了核心综述,还精心分类整理了大量关键论文与代码实现,涵盖离线强化学习、在线强化学习、模仿学习、轨迹生成及数据增强等多个子方向。其独特亮点在于构建了从理论规划到行为合成的完整知识图谱,帮助用户快速定位如 Diffuser、AdaptDiffuser 等经典算法的最新进展。无论是希望深入探索序列决策机制的科研人员,还是寻求将生成式 AI 应用于机器人控制、游戏策略等场景的算法工程师,都能从中获得宝贵的参考依据,高效把握技术演进脉络。
使用场景
某自动驾驶初创公司的算法团队正致力于利用离线强化学习(Offline RL)优化城市复杂路况下的车辆规划策略,急需引入扩散模型来提升行为生成的多样性与安全性。
没有 Diff4RLSurvey 时
- 文献检索如大海捞针:研究人员需在 arXiv 和 GitHub 上手动筛选海量论文,难以区分哪些是专门针对“序列决策”的扩散模型,哪些仅是图像生成应用。
- 技术选型缺乏依据:面对 Planning、Imitation Learning 或 Data Augmentation 等不同技术路线,团队无法快速找到对应的 SOTA(最先进)算法代码库进行对比验证。
- 复现成本极高:由于缺乏统一的资源索引,工程师常因找不到官方实现代码或关键超参数配置,导致在复现如"Diffuser"或"IDQL"等经典算法时浪费数周时间。
- 前沿动态滞后:团队容易遗漏如"SafeDiffuser"(安全规划)或"AdaptDiffuser"(自适应规划)等最新细分领域成果,导致技术方案落后于社区进展。
使用 Diff4RLSurvey 后
- 一站式精准导航:团队直接通过分类目录(如 Offline RL、Trajectory Generation)锁定目标,几分钟内即可获取该领域核心论文与对应代码链接。
- 场景化方案匹配:借助清晰的子类别划分,团队迅速定位到适合自动驾驶的“分层扩散规划”与“安全约束生成”类算法,大幅缩短技术调研周期。
- 高效复现与迭代:依托仓库提供的权威代码源和论文对照,工程师在一周内成功复现了多个基线模型,并快速在此基础上进行了定制化改进。
- 紧跟技术前沿:团队定期查阅该仓库更新,及时将“奖励引导条件扩散”等新范式融入系统,显著提升了车辆在极端工况下的决策鲁棒性。
Diff4RLSurvey 通过将分散的学术资源结构化,将原本数月的调研复现工作压缩至数天,成为连接扩散理论研究与实际工程落地的关键加速器。
运行环境要求
- 未说明
未说明
未说明
快速开始
用于序列决策的扩散模型:综述
本仓库包含关于序列决策领域中扩散模型的相关资源和论文集。
:rocket: 请查看我们的综述论文 用于强化学习的扩散模型:综述
目录
论文
离线强化学习
Metadiffuser: 扩散模型作为离线元强化学习的条件规划器, ICML 2023. [论文]
EDGI: 等变扩散用于具身智能体的规划, NeurIPS 2023. [论文]
从扩散模型中提取奖励函数, NeurIPS 2023. [论文]
预训练的文本到图像模型能否为强化学习生成视觉目标?, NeurIPS 2023. [论文]
SafeDiffuser: 基于扩散概率模型的安全规划, arXiv 2023. [论文]
超越保守主义:离线多智能体强化学习中的扩散策略, arXiv 2023. [论文]
利用条件扩散模型进行控制的价值函数估计, arXiv 2023. [论文]
具有时间条件指导的指令型扩散器用于离线强化学习, arXiv 2023. [论文]
用于离线强化学习中分布外泛化的扩散策略, arXiv 2023. [论文]
扩散策略作为多智能体强化学习策略, ICANN 2023. [论文]
基于扩散模型的自适应在线重规划, arXiv 2023. [论文]
SkillDiffuser: 基于技能抽象的可解释层次化规划在扩散驱动的任务执行中, CVPR 2024. [论文] [网站]
通过Q分数匹配从奖励中学习扩散模型策略, arXiv 2023. [论文]
使用扩散进行简单的层次化规划, ICLR 2024. [论文]
在离线强化学习中使用潜在扩散进行推理, ICLR 2024. [论文]
使用潜在扩散进行高效规划, ICLR 2024. [论文]
对比扩散器:通过对比学习规划至高回报状态, arXiv 2024. [论文]
扩散世界模型, arXiv 2024. [论文]
扩散世界模型, OpenReview 2024. [论文]
在线强化学习
基于扩散概率模型的强化学习策略表示,arXiv 2023。[论文]
利用一致性策略提升连续控制性能,arXiv 2023。[论文]
ATraDiff:利用想象轨迹加速在线强化学习,OpenReview 2024。[论文]
示范学习
DALL-E-Bot:将大规模网络级扩散模型引入机器人领域,RAL 2023。[论文]
XSkill:跨本体技能发现,CoRL 2023。[论文]
PlayFusion:通过语言标注的游戏进行扩散式技能获取,CoRL 2023。[论文]
用于从游戏中学习的多模态扩散 Transformer,CoRL 2023。[论文]
Crossway Diffusion:通过自监督学习改进基于扩散的视觉-运动策略,arXiv 2023。[论文] [代码]
利用潜在扩散模型生成行为多样化的策略,NeurIPS 2023。[论文]
利用预训练的图像编辑扩散模型实现零样本机器人操作,arXiv 2023。[论文]
基于净化后的演示数据进行示范学习,arXiv 2023。[论文]
规划即补洞:一种基于扩散的具身任务规划框架,适用于不确定性环境,arXiv 2023。[论文]
扩散遇见 DAgger:为眼手协调示范学习注入强大动力,arXiv 2024。[论文]
SculptDiff:基于目标条件扩散策略,从人类处学习机器人泥塑技能,arXiv 2024。[论文] [网站] [代码]
扩散 EDFs:在 SE(3) 上进行双等变去噪生成建模,用于视觉引导的机器人操作,CVPR 2024,[论文] [代码] [网站]
轨迹生成
MotionDiffuser:使用扩散模型进行可控的多智能体运动预测,CVPR 2023。[论文]
通过文本引导的视频生成学习通用策略,NeurIPS 2023。[论文]
EquiDiff:用于轨迹预测的条件等变扩散模型,arXiv 2023。[论文]
使用可组合扩散模型采样受限轨迹,IROS 2023。[论文]
DiMSam:在部分可观测环境下作为任务和运动规划采样器的扩散模型,arXiv 2023。[论文]
用于学习无碰撞轨迹生成的条件化得分模型,NeurIPSW 2022。[论文]
学习交互式真实世界模拟器,arXiv 2023。[论文]
数据增强
通过语义想象的经验扩展机器人学习,RSS 2023。[论文]
基于策略引导的轨迹扩散的世界模型,arXiv 2023。[论文]
通过轨迹拼接提炼条件扩散模型以用于离线强化学习,arXiv 2024。[论文]
DiffStitch:利用基于扩散的轨迹拼接提升离线强化学习,arXiv 2024。[论文]
引用
@article{zhu2023diffusion,
title={强化学习中的扩散模型:综述},
author={Zhu, Zhengbang and Zhao, Hanye and He, Haoran and Zhong, Yichao and Zhang, Shenyu and Yu, Yong and Zhang, Weinan},
journal={arXiv预印本 arXiv:2311.01223},
year={2023}
}
相似工具推荐
openclaw
OpenClaw 是一款专为个人打造的本地化 AI 助手,旨在让你在自己的设备上拥有完全可控的智能伙伴。它打破了传统 AI 助手局限于特定网页或应用的束缚,能够直接接入你日常使用的各类通讯渠道,包括微信、WhatsApp、Telegram、Discord、iMessage 等数十种平台。无论你在哪个聊天软件中发送消息,OpenClaw 都能即时响应,甚至支持在 macOS、iOS 和 Android 设备上进行语音交互,并提供实时的画布渲染功能供你操控。 这款工具主要解决了用户对数据隐私、响应速度以及“始终在线”体验的需求。通过将 AI 部署在本地,用户无需依赖云端服务即可享受快速、私密的智能辅助,真正实现了“你的数据,你做主”。其独特的技术亮点在于强大的网关架构,将控制平面与核心助手分离,确保跨平台通信的流畅性与扩展性。 OpenClaw 非常适合希望构建个性化工作流的技术爱好者、开发者,以及注重隐私保护且不愿被单一生态绑定的普通用户。只要具备基础的终端操作能力(支持 macOS、Linux 及 Windows WSL2),即可通过简单的命令行引导完成部署。如果你渴望拥有一个懂你
stable-diffusion-webui
stable-diffusion-webui 是一个基于 Gradio 构建的网页版操作界面,旨在让用户能够轻松地在本地运行和使用强大的 Stable Diffusion 图像生成模型。它解决了原始模型依赖命令行、操作门槛高且功能分散的痛点,将复杂的 AI 绘图流程整合进一个直观易用的图形化平台。 无论是希望快速上手的普通创作者、需要精细控制画面细节的设计师,还是想要深入探索模型潜力的开发者与研究人员,都能从中获益。其核心亮点在于极高的功能丰富度:不仅支持文生图、图生图、局部重绘(Inpainting)和外绘(Outpainting)等基础模式,还独创了注意力机制调整、提示词矩阵、负向提示词以及“高清修复”等高级功能。此外,它内置了 GFPGAN 和 CodeFormer 等人脸修复工具,支持多种神经网络放大算法,并允许用户通过插件系统无限扩展能力。即使是显存有限的设备,stable-diffusion-webui 也提供了相应的优化选项,让高质量的 AI 艺术创作变得触手可及。
everything-claude-code
everything-claude-code 是一套专为 AI 编程助手(如 Claude Code、Codex、Cursor 等)打造的高性能优化系统。它不仅仅是一组配置文件,而是一个经过长期实战打磨的完整框架,旨在解决 AI 代理在实际开发中面临的效率低下、记忆丢失、安全隐患及缺乏持续学习能力等核心痛点。 通过引入技能模块化、直觉增强、记忆持久化机制以及内置的安全扫描功能,everything-claude-code 能显著提升 AI 在复杂任务中的表现,帮助开发者构建更稳定、更智能的生产级 AI 代理。其独特的“研究优先”开发理念和针对 Token 消耗的优化策略,使得模型响应更快、成本更低,同时有效防御潜在的攻击向量。 这套工具特别适合软件开发者、AI 研究人员以及希望深度定制 AI 工作流的技术团队使用。无论您是在构建大型代码库,还是需要 AI 协助进行安全审计与自动化测试,everything-claude-code 都能提供强大的底层支持。作为一个曾荣获 Anthropic 黑客大奖的开源项目,它融合了多语言支持与丰富的实战钩子(hooks),让 AI 真正成长为懂上
ComfyUI
ComfyUI 是一款功能强大且高度模块化的视觉 AI 引擎,专为设计和执行复杂的 Stable Diffusion 图像生成流程而打造。它摒弃了传统的代码编写模式,采用直观的节点式流程图界面,让用户通过连接不同的功能模块即可构建个性化的生成管线。 这一设计巧妙解决了高级 AI 绘图工作流配置复杂、灵活性不足的痛点。用户无需具备编程背景,也能自由组合模型、调整参数并实时预览效果,轻松实现从基础文生图到多步骤高清修复等各类复杂任务。ComfyUI 拥有极佳的兼容性,不仅支持 Windows、macOS 和 Linux 全平台,还广泛适配 NVIDIA、AMD、Intel 及苹果 Silicon 等多种硬件架构,并率先支持 SDXL、Flux、SD3 等前沿模型。 无论是希望深入探索算法潜力的研究人员和开发者,还是追求极致创作自由度的设计师与资深 AI 绘画爱好者,ComfyUI 都能提供强大的支持。其独特的模块化架构允许社区不断扩展新功能,使其成为当前最灵活、生态最丰富的开源扩散模型工具之一,帮助用户将创意高效转化为现实。
gemini-cli
gemini-cli 是一款由谷歌推出的开源 AI 命令行工具,它将强大的 Gemini 大模型能力直接集成到用户的终端环境中。对于习惯在命令行工作的开发者而言,它提供了一条从输入提示词到获取模型响应的最短路径,无需切换窗口即可享受智能辅助。 这款工具主要解决了开发过程中频繁上下文切换的痛点,让用户能在熟悉的终端界面内直接完成代码理解、生成、调试以及自动化运维任务。无论是查询大型代码库、根据草图生成应用,还是执行复杂的 Git 操作,gemini-cli 都能通过自然语言指令高效处理。 它特别适合广大软件工程师、DevOps 人员及技术研究人员使用。其核心亮点包括支持高达 100 万 token 的超长上下文窗口,具备出色的逻辑推理能力;内置 Google 搜索、文件操作及 Shell 命令执行等实用工具;更独特的是,它支持 MCP(模型上下文协议),允许用户灵活扩展自定义集成,连接如图像生成等外部能力。此外,个人谷歌账号即可享受免费的额度支持,且项目基于 Apache 2.0 协议完全开源,是提升终端工作效率的理想助手。
LLMs-from-scratch
LLMs-from-scratch 是一个基于 PyTorch 的开源教育项目,旨在引导用户从零开始一步步构建一个类似 ChatGPT 的大型语言模型(LLM)。它不仅是同名技术著作的官方代码库,更提供了一套完整的实践方案,涵盖模型开发、预训练及微调的全过程。 该项目主要解决了大模型领域“黑盒化”的学习痛点。许多开发者虽能调用现成模型,却难以深入理解其内部架构与训练机制。通过亲手编写每一行核心代码,用户能够透彻掌握 Transformer 架构、注意力机制等关键原理,从而真正理解大模型是如何“思考”的。此外,项目还包含了加载大型预训练权重进行微调的代码,帮助用户将理论知识延伸至实际应用。 LLMs-from-scratch 特别适合希望深入底层原理的 AI 开发者、研究人员以及计算机专业的学生。对于不满足于仅使用 API,而是渴望探究模型构建细节的技术人员而言,这是极佳的学习资源。其独特的技术亮点在于“循序渐进”的教学设计:将复杂的系统工程拆解为清晰的步骤,配合详细的图表与示例,让构建一个虽小但功能完备的大模型变得触手可及。无论你是想夯实理论基础,还是为未来研发更大规模的模型做准备