GeoSeg
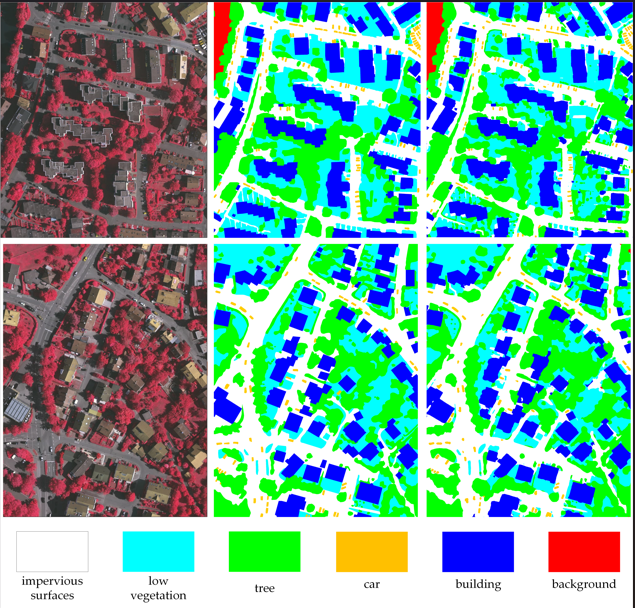
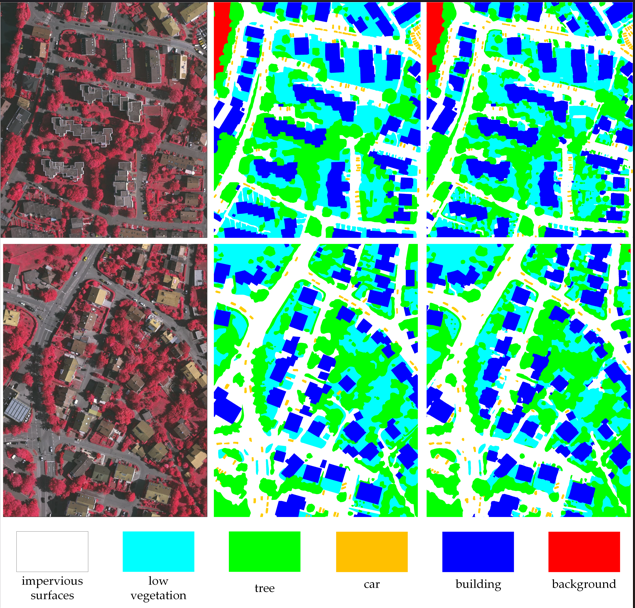
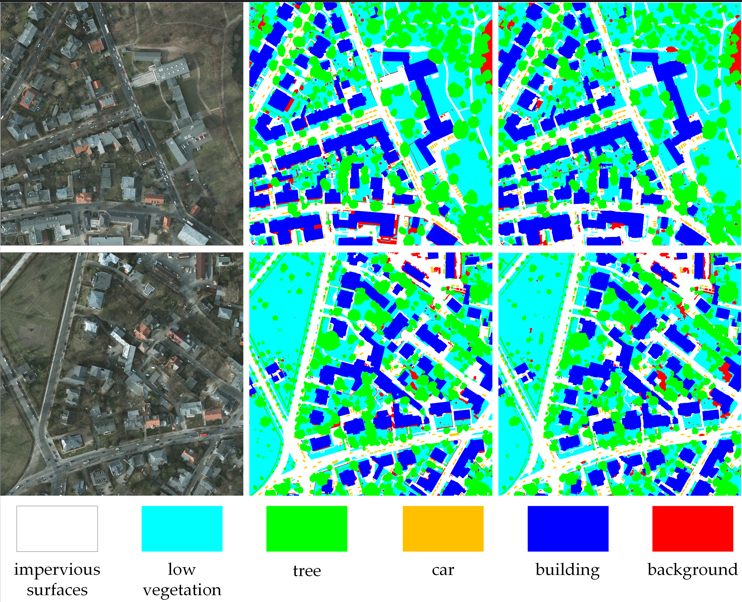
GeoSeg 是一个基于 PyTorch 打造的开源语义分割工具箱,专为遥感图像分析而设计。它致力于解决卫星、航空及无人机影像中复杂城市场景的精确识别难题,能够高效地将图像中的建筑物、道路、植被等要素自动分类提取。
这款工具非常适合从事遥感算法研究的研究人员、需要开发地物提取功能的开发者,以及测绘地理信息领域的专业人士使用。GeoSeg 的核心亮点在于其聚焦于先进的视觉 Transformer 架构,不仅收录了获 ISPRS 推荐的 UNetFormer 模型,还集成了最新的 PyramidMamba 等多种前沿网络。它提供了统一的训练基准,支持多 GPU 加速训练与多尺度测试,并具备对超大幅面遥感图像的直接推理能力,极大降低了处理海量数据的门槛。借助 PyTorch Lightning 和 timm 库,GeoSeg 代码结构简洁清晰,便于用户进行二次开发与实验验证,是探索遥感智能解译技术的得力助手。
使用场景
某城市规划研究院的技术团队正利用无人机航拍的高分辨率影像,对城市新区的建筑、道路及植被进行自动化语义分割,以辅助土地利用分析。
没有 GeoSeg 时
- 模型适配困难:面对卫星、航空及无人机等多源异构数据,团队需手动修改代码适配不同网络架构,开发周期长达数周。
- 大图推理崩溃:处理千兆级(GB)的原始遥感影像时,显存极易溢出,不得不人工切割图像,导致地物边界分割破碎且后期拼接繁琐。
- 精度与效率难平衡:传统 CNN 模型在复杂城市场景下对细小道路识别率低,而引入 Transformer 模型又面临训练配置复杂、多卡并行调试痛苦的问题。
- 基准不统一:缺乏统一的训练评估框架,对比不同算法(如 UNetFormer 与 MANet)时需重复编写数据加载和评估脚本,实验复现性差。
使用 GeoSeg 后
- 开箱即用多模型:直接调用内置的 UNetFormer、PyramidMamba 等先进模型,配合 PyTorch Lightning 统一接口,半天内即可完成从数据加载到模型微调的全流程。
- 无缝处理超大影像:利用
inference_huge_image.py脚本,GeoSeg 支持对海量遥感图像进行滑动窗口推理,自动解决显存限制并输出完整、边缘平滑的分割图。 - 性能显著提升:借助针对遥感优化的 Vision Transformer 架构,在 ISPRS 或 UAVid 数据集上实现了更高的平均交并比(mIoU),精准识别狭窄道路与密集建筑。
- 高效实验迭代:依托统一的基准测试环境,团队可轻松切换不同骨干网络并进行多尺度训练验证,将算法选型与调优效率提升了 3 倍以上。
GeoSeg 通过提供统一、高效且专为遥感设计的深度学习框架,让规划团队从繁琐的工程调试中解放出来,专注于提升城市感知分析的精度与价值。
运行环境要求
- Linux
需要 NVIDIA GPU (安装命令指定了 cu118),支持多 GPU 训练,具体显存需求未说明(建议 8GB+ 以处理遥感大图)
未说明
快速开始
版本 2.0(稳定版)
新闻
![]()
![]()
![]()
![]()
- PyramidMamba 的代码已发布。
- 我已将此仓库更新至 PyTorch 2.0 和 PyTorch Lightning 2.0,支持多 GPU 训练等。
- 骨干网络的预训练权重可通过 Google Drive 获取。
- 支持 UNetFormer(已被 ISPRS 接受,PDF) 和 UAVid 数据集。
- 支持 ISPRS Vaihingen 和 Potsdam 数据集。由于不允许私下分享,您需要从官方网站下载数据集,并按照 文件夹结构 进行划分。
- 更多网络已更新,并提供了预训练权重的链接。
- config/loveda/dcswin.py 提供了关于 config 设置的详细说明。
- 支持对大型遥感图像进行推理(inference_huge_image.py)。
简介
GeoSeg 是一个基于 PyTorch、pytorch lightning 和 timm 的开源语义分割工具箱,主要专注于开发用于遥感图像分割的先进视觉 Transformer 模型。
主要特性
统一基准测试
我们为各种分割方法提供统一的训练脚本。
简单高效
得益于 pytorch lightning 和 timm,代码易于进一步开发。
支持的遥感数据集
- ISPRS Vaihingen 和 Potsdam
- UAVid
- LoveDA
- OpenEarthMap
- 未来还将支持更多数据集。
多尺度训练与测试
对大型遥感图像的推理
支持的网络
Mamba
视觉 Transformer
CNN
文件夹结构
请准备以下文件夹以组织此仓库:
airs
├── GeoSeg (代码)
├── pretrain_weights (骨干网络的预训练权重,如 vit、swin 等)
├── model_weights (保存在 ISPRS Vaihingen、LoveDA 等数据集上训练的模型权重)
├── fig_results (保存模型预测的掩码)
├── lightning_logs (CSV 格式的训练日志)
├── data
│ ├── LoveDA
│ │ ├── Train
│ │ │ ├── Urban
│ │ │ │ ├── images_png (原始图像)
│ │ │ │ ├── masks_png (原始掩码)
│ │ │ │ ├── masks_png_convert (用于训练的转换后掩码)
│ │ │ │ ├── masks_png_convert_rgb (原始 RGB 格式掩码)
│ │ │ ├── Rural
│ │ │ │ ├── images_png
│ │ │ │ ├── masks_png
│ │ │ │ ├── masks_png_convert
│ │ │ │ ├── masks_png_convert_rgb
│ │ ├── Val (与 Train 相同)
│ │ ├── Test
│ │ ├── train_val (合并 Train 和 Val)
│ ├── uavid
│ │ ├── uavid_train (原始)
│ │ ├── uavid_val (原始)
│ │ ├── uavid_test (原始)
│ │ ├── uavid_train_val (合并 uavid_train 和 uavid_val)
│ │ ├── train (处理后)
│ │ ├── val (处理后)
│ │ ├── train_val (处理后)
│ ├── vaihingen
│ │ ├── train_images (原始)
│ │ ├── train_masks (原始)
│ │ ├── test_images (原始)
│ │ ├── test_masks (原始)
│ │ ├── test_masks_eroded (原始)
│ │ ├── train (处理后)
│ │ ├── test (处理后)
│ ├── potsdam (与 vaihingen 相同)
安装
使用 Linux 终端 打开 airs 文件夹,并创建 Python 环境:
conda create -n airs python=3.8
conda activate airs
pip3 install torch torchvision torchaudio --index-url https://download.pytorch.org/whl/cu118
pip install -r GeoSeg/requirements.txt
安装 Mamba:
pip install causal-conv1d>=1.4.0
pip install mamba-ssm
骨干网络的预训练权重
Baidu Disk : 1234
数据预处理
从官方网站下载数据集,并自行进行划分。
Vaihingen
生成训练集。
python GeoSeg/tools/vaihingen_patch_split.py \
--img-dir "data/vaihingen/train_images" \
--mask-dir "data/vaihingen/train_masks" \
--output-img-dir "data/vaihingen/train/images_1024" \
--output-mask-dir "data/vaihingen/train/masks_1024" \
--mode "train" --split-size 1024 --stride 512
生成测试集。
python GeoSeg/tools/vaihingen_patch_split.py \
--img-dir "data/vaihingen/test_images" \
--mask-dir "data/vaihingen/test_masks_eroded" \
--output-img-dir "data/vaihingen/test/images_1024" \
--output-mask-dir "data/vaihingen/test/masks_1024" \
--mode "val" --split-size 1024 --stride 1024 \
--eroded
生成用于可视化的 masks_1024_rgb(RGB格式的真值标签)。
python GeoSeg/tools/vaihingen_patch_split.py \
--img-dir "data/vaihingen/test_images" \
--mask-dir "data/vaihingen/test_masks" \
--output-img-dir "data/vaihingen/test/images_1024" \
--output-mask-dir "data/vaihingen/test/masks_1024_rgb" \
--mode "val" --split-size 1024 --stride 1024 \
--gt
对于验证集,可以从训练集中选取部分图像来构建。
Potsdam
python GeoSeg/tools/potsdam_patch_split.py \
--img-dir "data/potsdam/train_images" \
--mask-dir "data/potsdam/train_masks" \
--output-img-dir "data/potsdam/train/images_1024" \
--output-mask-dir "data/potsdam/train/masks_1024" \
--mode "train" --split-size 1024 --stride 1024 --rgb-image
python GeoSeg/tools/potsdam_patch_split.py \
--img-dir "data/potsdam/test_images" \
--mask-dir "data/potsdam/test_masks_eroded" \
--output-img-dir "data/potsdam/test/images_1024" \
--output-mask-dir "data/potsdam/test/masks_1024" \
--mode "val" --split-size 1024 --stride 1024 \
--eroded --rgb-image
python GeoSeg/tools/potsdam_patch_split.py \
--img-dir "data/potsdam/test_images" \
--mask-dir "data/potsdam/test_masks" \
--output-img-dir "data/potsdam/test/images_1024" \
--output-mask-dir "data/potsdam/test/masks_1024_rgb" \
--mode "val" --split-size 1024 --stride 1024 \
--gt --rgb-image
UAVid
python GeoSeg/tools/uavid_patch_split.py \
--input-dir "data/uavid/uavid_train_val" \
--output-img-dir "data/uavid/train_val/images" \
--output-mask-dir "data/uavid/train_val/masks" \
--mode 'train' --split-size-h 1024 --split-size-w 1024 \
--stride-h 1024 --stride-w 1024
python GeoSeg/tools/uavid_patch_split.py \
--input-dir "data/uavid/uavid_train" \
--output-img-dir "data/uavid/train/images" \
--output-mask-dir "data/uavid/train/masks" \
--mode 'train' --split-size-h 1024 --split-size-w 1024 \
--stride-h 1024 --stride-w 1024
python GeoSeg/tools/uavid_patch_split.py \
--input-dir "data/uavid/uavid_val" \
--output-img-dir "data/uavid/val/images" \
--output-mask-dir "data/uavid/val/masks" \
--mode 'val' --split-size-h 1024 --split-size-w 1024 \
--stride-h 1024 --stride-w 1024
LoveDA
python GeoSeg/tools/loveda_mask_convert.py --mask-dir data/LoveDA/Train/Rural/masks_png --output-mask-dir data/LoveDA/Train/Rural/masks_png_convert
python GeoSeg/tools/loveda_mask_convert.py --mask-dir data/LoveDA/Train/Urban/masks_png --output-mask-dir data/LoveDA/Train/Urban/masks_png_convert
python GeoSeg/tools/loveda_mask_convert.py --mask-dir data/LoveDA/Val/Rural/masks_png --output-mask-dir data/LoveDA/Val/Rural/masks_png_convert
python GeoSeg/tools/loveda_mask_convert.py --mask-dir data/LoveDA/Val/Urban/masks_png --output-mask-dir data/LoveDA/Val/Urban/masks_png_convert
训练
“-c”表示配置文件的路径,使用不同的配置文件来训练不同的模型。
python GeoSeg/train_supervision.py -c GeoSeg/config/uavid/unetformer.py
测试
“-c”表示配置文件的路径,使用不同的配置文件来测试不同的模型。
“-o”表示输出路径
“-t”表示测试时增强(TTA),可取[None, 'lr', 'd4'],默认为None,'lr'为翻转TTA,'d4'为多尺度TTA
“--rgb”表示是否以RGB格式输出掩码
Vaihingen
python GeoSeg/vaihingen_test.py -c GeoSeg/config/vaihingen/dcswin.py -o fig_results/vaihingen/dcswin --rgb -t 'd4'
Potsdam
python GeoSeg/potsdam_test.py -c GeoSeg/config/potsdam/dcswin.py -o fig_results/potsdam/dcswin --rgb -t 'lr'
LoveDA(在线测试)
python GeoSeg/loveda_test.py -c GeoSeg/config/loveda/dcswin.py -o fig_results/loveda/dcswin_test -t 'd4'
UAVid(在线测试)
python GeoSeg/inference_uavid.py \
-i 'data/uavid/uavid_test' \
-c GeoSeg/config/uavid/unetformer.py \
-o fig_results/uavid/unetformer_r18 \
-t 'lr' -ph 1152 -pw 1024 -b 2 -d "uavid"
大型遥感图像推理
python GeoSeg/inference_huge_image.py \
-i data/vaihingen/test_images \
-c GeoSeg/config/vaihingen/dcswin.py \
-o fig_results/vaihingen/dcswin_huge \
-t 'lr' -ph 512 -pw 512 -b 2 -d "pv"
复现结果
| 方法 | 数据集 | F1 | OA | mIoU |
|---|---|---|---|---|
| UNetFormer | UAVid | - | - | 67.63 |
| UNetFormer | Vaihingen | 90.30 | 91.10 | 82.54 |
| UNetFormer | Potsdam | 92.64 | 91.19 | 86.52 |
| UNetFormer | LoveDA | - | - | 52.97 |
| FT-UNetFormer | Vaihingen | 91.17 | 91.74 | 83.98 |
| FT-UNetFormer | Potsdam | 93.22 | 91.87 | 87.50 |
由于训练阶段存在一些随机操作,复现结果(单次运行)与论文中报告的结果略有差异。
引用
如果您在研究中发现本项目有用,请考虑引用以下文献:
- UNetFormer:一种类似UNet的Transformer,用于高效语义分割遥感城市场景图像
- 一种基于Transformer的新型语义分割方案,适用于高分辨率遥感图像
- Transformer与卷积相遇:一种双侧感知网络,用于非常精细分辨率的城市场景图像语义分割
- ABCNet:一种注意力驱动的双侧上下文网络,用于高效语义分割高分辨率遥感图像
- 用于高分辨率遥感图像语义分割的多注意力网络
- 用于高分辨率遥感图像语义分割的A2-FPN
致谢
我们希望 GeoSeg 能够通过提供统一的基准测试,服务于不断发展的遥感研究,并激励研究人员开发自己的分割网络。在此,特别感谢以下项目对 GeoSeg 的贡献:
相似工具推荐
openclaw
OpenClaw 是一款专为个人打造的本地化 AI 助手,旨在让你在自己的设备上拥有完全可控的智能伙伴。它打破了传统 AI 助手局限于特定网页或应用的束缚,能够直接接入你日常使用的各类通讯渠道,包括微信、WhatsApp、Telegram、Discord、iMessage 等数十种平台。无论你在哪个聊天软件中发送消息,OpenClaw 都能即时响应,甚至支持在 macOS、iOS 和 Android 设备上进行语音交互,并提供实时的画布渲染功能供你操控。 这款工具主要解决了用户对数据隐私、响应速度以及“始终在线”体验的需求。通过将 AI 部署在本地,用户无需依赖云端服务即可享受快速、私密的智能辅助,真正实现了“你的数据,你做主”。其独特的技术亮点在于强大的网关架构,将控制平面与核心助手分离,确保跨平台通信的流畅性与扩展性。 OpenClaw 非常适合希望构建个性化工作流的技术爱好者、开发者,以及注重隐私保护且不愿被单一生态绑定的普通用户。只要具备基础的终端操作能力(支持 macOS、Linux 及 Windows WSL2),即可通过简单的命令行引导完成部署。如果你渴望拥有一个懂你
stable-diffusion-webui
stable-diffusion-webui 是一个基于 Gradio 构建的网页版操作界面,旨在让用户能够轻松地在本地运行和使用强大的 Stable Diffusion 图像生成模型。它解决了原始模型依赖命令行、操作门槛高且功能分散的痛点,将复杂的 AI 绘图流程整合进一个直观易用的图形化平台。 无论是希望快速上手的普通创作者、需要精细控制画面细节的设计师,还是想要深入探索模型潜力的开发者与研究人员,都能从中获益。其核心亮点在于极高的功能丰富度:不仅支持文生图、图生图、局部重绘(Inpainting)和外绘(Outpainting)等基础模式,还独创了注意力机制调整、提示词矩阵、负向提示词以及“高清修复”等高级功能。此外,它内置了 GFPGAN 和 CodeFormer 等人脸修复工具,支持多种神经网络放大算法,并允许用户通过插件系统无限扩展能力。即使是显存有限的设备,stable-diffusion-webui 也提供了相应的优化选项,让高质量的 AI 艺术创作变得触手可及。
everything-claude-code
everything-claude-code 是一套专为 AI 编程助手(如 Claude Code、Codex、Cursor 等)打造的高性能优化系统。它不仅仅是一组配置文件,而是一个经过长期实战打磨的完整框架,旨在解决 AI 代理在实际开发中面临的效率低下、记忆丢失、安全隐患及缺乏持续学习能力等核心痛点。 通过引入技能模块化、直觉增强、记忆持久化机制以及内置的安全扫描功能,everything-claude-code 能显著提升 AI 在复杂任务中的表现,帮助开发者构建更稳定、更智能的生产级 AI 代理。其独特的“研究优先”开发理念和针对 Token 消耗的优化策略,使得模型响应更快、成本更低,同时有效防御潜在的攻击向量。 这套工具特别适合软件开发者、AI 研究人员以及希望深度定制 AI 工作流的技术团队使用。无论您是在构建大型代码库,还是需要 AI 协助进行安全审计与自动化测试,everything-claude-code 都能提供强大的底层支持。作为一个曾荣获 Anthropic 黑客大奖的开源项目,它融合了多语言支持与丰富的实战钩子(hooks),让 AI 真正成长为懂上
ComfyUI
ComfyUI 是一款功能强大且高度模块化的视觉 AI 引擎,专为设计和执行复杂的 Stable Diffusion 图像生成流程而打造。它摒弃了传统的代码编写模式,采用直观的节点式流程图界面,让用户通过连接不同的功能模块即可构建个性化的生成管线。 这一设计巧妙解决了高级 AI 绘图工作流配置复杂、灵活性不足的痛点。用户无需具备编程背景,也能自由组合模型、调整参数并实时预览效果,轻松实现从基础文生图到多步骤高清修复等各类复杂任务。ComfyUI 拥有极佳的兼容性,不仅支持 Windows、macOS 和 Linux 全平台,还广泛适配 NVIDIA、AMD、Intel 及苹果 Silicon 等多种硬件架构,并率先支持 SDXL、Flux、SD3 等前沿模型。 无论是希望深入探索算法潜力的研究人员和开发者,还是追求极致创作自由度的设计师与资深 AI 绘画爱好者,ComfyUI 都能提供强大的支持。其独特的模块化架构允许社区不断扩展新功能,使其成为当前最灵活、生态最丰富的开源扩散模型工具之一,帮助用户将创意高效转化为现实。
gemini-cli
gemini-cli 是一款由谷歌推出的开源 AI 命令行工具,它将强大的 Gemini 大模型能力直接集成到用户的终端环境中。对于习惯在命令行工作的开发者而言,它提供了一条从输入提示词到获取模型响应的最短路径,无需切换窗口即可享受智能辅助。 这款工具主要解决了开发过程中频繁上下文切换的痛点,让用户能在熟悉的终端界面内直接完成代码理解、生成、调试以及自动化运维任务。无论是查询大型代码库、根据草图生成应用,还是执行复杂的 Git 操作,gemini-cli 都能通过自然语言指令高效处理。 它特别适合广大软件工程师、DevOps 人员及技术研究人员使用。其核心亮点包括支持高达 100 万 token 的超长上下文窗口,具备出色的逻辑推理能力;内置 Google 搜索、文件操作及 Shell 命令执行等实用工具;更独特的是,它支持 MCP(模型上下文协议),允许用户灵活扩展自定义集成,连接如图像生成等外部能力。此外,个人谷歌账号即可享受免费的额度支持,且项目基于 Apache 2.0 协议完全开源,是提升终端工作效率的理想助手。
markitdown
MarkItDown 是一款由微软 AutoGen 团队打造的轻量级 Python 工具,专为将各类文件高效转换为 Markdown 格式而设计。它支持 PDF、Word、Excel、PPT、图片(含 OCR)、音频(含语音转录)、HTML 乃至 YouTube 链接等多种格式的解析,能够精准提取文档中的标题、列表、表格和链接等关键结构信息。 在人工智能应用日益普及的今天,大语言模型(LLM)虽擅长处理文本,却难以直接读取复杂的二进制办公文档。MarkItDown 恰好解决了这一痛点,它将非结构化或半结构化的文件转化为模型“原生理解”且 Token 效率极高的 Markdown 格式,成为连接本地文件与 AI 分析 pipeline 的理想桥梁。此外,它还提供了 MCP(模型上下文协议)服务器,可无缝集成到 Claude Desktop 等 LLM 应用中。 这款工具特别适合开发者、数据科学家及 AI 研究人员使用,尤其是那些需要构建文档检索增强生成(RAG)系统、进行批量文本分析或希望让 AI 助手直接“阅读”本地文件的用户。虽然生成的内容也具备一定可读性,但其核心优势在于为机器