LiDAR-MOS
LiDAR-MOS 是一款专注于 3D 激光雷达数据中动态物体分割的开源算法。它的核心能力是精准区分场景中的移动物体(如行驶的车辆、行人)与静态背景(包括路边停放的汽车),从而解决自动驾驶感知中“动”与“静”难以辨析的关键难题。
通过利用连续帧的时序信息,LiDAR-MOS 采用基于深度学习的方法,不仅分割精度高,而且运行速度极快,能够超越传感器的帧率实现实时处理。这一特性使其非常适合集成到现有的激光雷达语义分割网络中,无需大幅改动原有架构,仅需调整数据输入即可生效。此外,该项目还基于 SemanticKITTI 数据集建立了全新的行业基准,推动了相关领域的评估标准化。
LiDAR-MOS 主要面向自动驾驶领域的研究人员、算法工程师及机器人开发者。对于希望提升 3D 建图、SLAM(即时定位与地图构建)或里程计精度的团队来说,它是一个极具价值的工具,能有效剔除动态物体干扰,生成更纯净的静态环境地图。其代码基于 SalsaNext 等成熟框架开发,具备良好的兼容性与扩展性,便于用户快速上手并进行二次开发。
使用场景
某自动驾驶团队正在开发城市复杂路况下的高精度建图系统,需要处理包含大量行驶车辆和行人的动态点云数据。
没有 LiDAR-MOS 时
- 建图重影严重:传统 SLAM 算法无法区分静止与移动物体,将行驶中的车辆误认为静态特征,导致生成的地图中出现“鬼影”或双重轮廓。
- 定位漂移频繁:动态物体(如路过的大巴)被错误匹配为路标,干扰里程计计算,致使车辆在高速场景下定位突然跳变。
- 感知逻辑混乱:下游规划模块难以分辨路边停靠车辆与正常行驶车辆,不得不依赖复杂的启发式规则进行二次过滤,增加开发负担。
- 实时性瓶颈:原有的多帧差分法计算量大且噪声敏感,难以在车载嵌入式平台上满足传感器帧率的实时处理要求。
使用 LiDAR-MOS 后
- 地图纯净清晰:LiDAR-MOS 利用序列数据精准分割动态目标,自动剔除移动车辆点云,仅保留静态背景用于建图,彻底消除重影。
- 定位稳健可靠:通过预先分离动静态物体,SLAM 系统仅基于静态特征进行配准,显著提升了在车流密集区的定位精度与稳定性。
- 语义理解升级:直接输出像素级的动静态标签,系统能天然区分“违停车辆”与“正常通行车辆”,简化了行为预测模块的逻辑。
- 高效实时运行:该工具基于范围图像(Range Image)优化,推理速度快于激光雷达采样频率,轻松在实车端实现低延迟部署。
LiDAR-MOS 通过深度学习时序信息,从根本上解决了动态场景下的点云语义分割难题,是构建高鲁棒性自动驾驶感知与建图系统的关键组件。
运行环境要求
- Linux
需要 NVIDIA GPU (基于 CUDA),具体型号未说明,需支持 PyTorch CUDA 加速
未说明
快速开始
LMNet:3D LiDAR 数据中的运动目标分割
本仓库包含我们论文《3D LiDAR 数据中的运动目标分割:一种利用序列数据的基于学习的方法》PDF 的代码。
我们的方法能够准确地将场景分割为运动对象和静止对象,即区分行驶中的车辆与停放的车辆。这项任务也被称为 3D 运动检测或分割。 我们的方法运行速度超过传感器的帧率,可用于改善基于 3D LiDAR 的里程计/SLAM 和建图结果,如 下方 所示。
此外,我们基于 SemanticKITTI 创建了一个新的 LiDAR 运动目标分割基准测试 这里。
完整的演示视频可在 YouTube 上 这里 观看。LiDAR-MOS 实际应用效果:
目录
发表论文
如果您在学术工作中使用了我们的代码和基准测试,请引用相应的 论文:
@article{chen2021ral,
title={{3D LiDAR 数据中的运动目标分割:一种利用序列数据的基于学习的方法}},
author={X. Chen and S. Li and B. Mersch and L. Wiesmann and J. Gall and J. Behley and C. Stachniss},
year={2021},
volume=6,
issue=4,
pages={6529-6536},
journal={IEEE Robotics and Automation Letters (RA-L)},
url = {http://www.ipb.uni-bonn.de/pdfs/chen2021ral-iros.pdf},
doi = {10.1109/LRA.2021.3093567},
issn = {2377-3766},
}
日志
新闻 20220907
旧的 Codalab 服务器已停止服务。
请使用新链接 这里 提交您的结果到基准测试。 您仍然可以在 这里 查找旧的结果。
新闻 20220706
我们的 MotionSeg3D 已开源 这里。
它采用双分支双头结构,融合时空信息进行 LiDAR 运动目标分割。
新闻 20220615
我们的 4DMOS 已开源 这里。
它利用稀疏 CNN 处理 4D 点云,用于 LiDAR 运动目标分割。
v1.1
感谢 Jiadai Sun 对 SalsaNext-MOS 的测试及部分 bug 的修复。
更多设置也可参见 #47。
v1.0
开源版本
参考依赖
我们基于 SalsaNext、RangeNet++ 和 MINet 构建并测试了我们的工作。 我们感谢原作者们的优秀工作和实现。如果您对快速的 LiDAR 语义分割感兴趣,强烈建议您查看这些原始仓库。
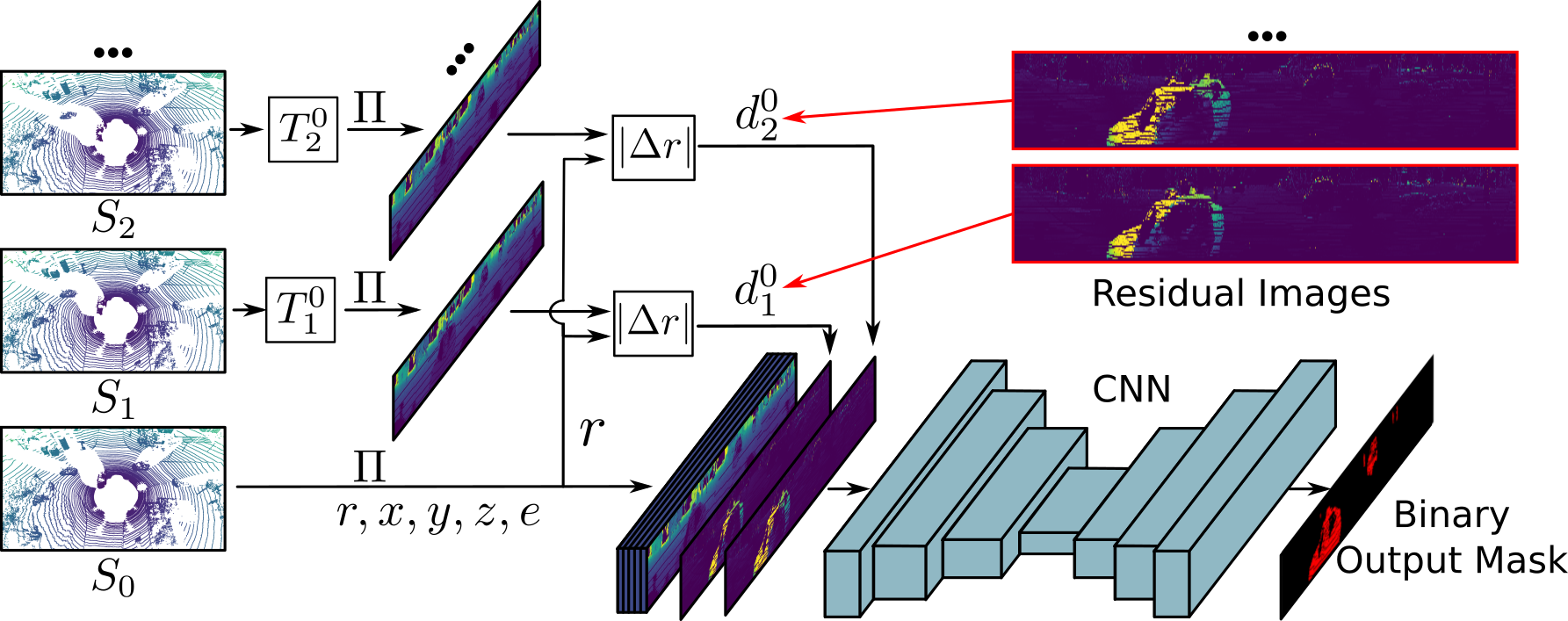
请注意,在本仓库中,我们展示了如何利用现有分割网络轻松实现基于序列信息的 LiDAR 运动目标分割。 我们并未修改原始分割网络的流程,仅按照下图所示更改了数据加载器和网络输入。 因此,我们的方法可以与任何基于范围图像的 LiDAR 分割网络配合使用。
我们的方法基于范围图像。若要使用快速 C++ 库进行范围投影,请参阅使用说明 这里。
使用方法
为了快速测试以下所有步骤,您可以下载一个玩具数据集 这里,并按照数据结构 data/README.md 解压到 data\ 文件夹中。
准备训练数据
要使用我们的方法,需要生成残差图像。以下是快速演示:
$ python3 utils/gen_residual_images.py
有关数据准备的更多设置可在 yaml 文件 config/data_preparing.yaml 中找到。 要准备整个 KITTI 驾驶数据集的训练数据,请从 官方网站 下载。
使用 SalsaNext 作为基线
要将 SalsaNext 用作 LiDAR-MOS 的基线分割网络,应按照 mos_SalsaNext/README.md 进行设置。
请注意,我们使用的是 pytorch v1.5.1+cu101,这与原始版本有所不同。相关问题的更多信息可参见 这里。
推理
要使用预训练模型生成 LiDAR-MOS 预测结果(需先解压 下载),可在玩具数据集上进行快速测试:
$ cd mos_SalsaNext/train/tasks/semantic
$ python3 infer.py -d ../../../../data -m ../../../../data/model_salsanext_residual_1 -l ../../../../data/predictions_salsanext_residual_1_new -s valid
若要对整个数据集进行推理,请从 官方网站 下载 KITTI 驾驶数据集,并相应地更改路径:
$ cd mos_SalsaNext/train/tasks/semantic
$ python3 infer.py -d path/to/kitti/dataset -m path/to/pretrained_model -l path/to/log -s train/valid/test # 根据所需评估的划分而定
训练
要从头开始训练一个基于 SalsaNext 的 LiDAR-MOS 网络,必须下载 KITTI 驾驶数据集 和 Semantic-Kitti 数据集: 更改相应路径后运行:
$ cd mos_SalsaNext/train/tasks/semantic
$ ./train.sh -d path/to/kitti/dataset -a salsanext_mos.yml -l path/to/log -c 0 # 使用的 GPU 核心数
使用 RangeNet++ 作为基线
要将 RangeNet++ 用作 LiDAR-MOS 的基准分割网络,应按照 mos_RangeNet/README.md 中的说明进行设置。
推理
要对整个数据集进行推理,请从 官方网站 下载 KITTI-里程计数据集和 预训练模型,并修改相应的路径。
$ cd mos_RangeNet/tasks/semantic
$ python3 infer.py -d 数据集路径 -m 模型路径 -l 日志路径 -s train/valid/test # 根据需要评估的划分选择
训练
要从头开始使用 RangeNet++ 训练 LiDAR-MOS 网络,必须下载 KITTI-里程计数据集 和 Semantic-Kitti 数据集,并修改相应的路径后运行:
$ cd mos_RangeNet/tasks/semantic
$ python3 train.py -d 数据集路径 -ac rangenet_mos.yaml -l 日志路径
更多预训练模型和 LiDAR-MOS 预测结果可在 下载集合 中找到。
评估与可视化
如何评估
评估指标。我们称 移动(动态) 状态为 D,静态 状态为 S。
由于我们忽略了未标记和无效状态,因此在 MOD 中只有两类。
| GT\预测 | 动态 | 静态 |
|---|---|---|
| 动态 | TD | FS |
| 静态 | FD | TS |
- $$ IoU_{MOS} = \frac{TD}{TD+FD+FS} $$
要在玩具数据集中评估 MOS 结果,只需运行:
$ python3 utils/evaluate_mos.py -d data -p data/predictions_salsanext_residual_1_valid -s valid
要在我们的 LiDAR-MOS 基准测试 上评估 MOS 结果,请查看我们的 semantic-kitti-api 和基准测试 网站。
如何可视化预测结果
要在玩具数据集中可视化 MOS 结果,只需运行:
$ python3 utils/visualize_mos.py -d data -p data/predictions_salsanext_residual_1_valid -s 8 # 这里我们使用特定的序列号
其中:
sequence是要访问的序列。dataset是 KITTI 数据集的路径,其中包含序列目录。
导航:
n是下一帧扫描,b是上一帧扫描,esc或q退出。
应用
LiDAR-MOS 对构建一致的地图、进行未来状态预测、避免碰撞以及规划路径非常重要。它还可以改进和增强位姿估计、传感器数据配准和 SLAM。这里我们展示了 LiDAR-MOS 的两个明显应用:基于 LiDAR 的里程计/SLAM 以及 3D 建图。在此之前,我们还展示了两个简单的示例,说明如何将我们的方法与语义结合,并清理扫描数据。清理扫描数据后,我们可以获得更好的里程计/SLAM 和 3D 建图结果。
请注意,这里我们展示了两种直接使用 MOS 方法的案例,未采用任何进一步优化。
与语义结合
为了展示一种简单的方式,将我们的 LiDAR-MOS 与语义结合,我们提供了一个使用玩具数据集的快速演示:
$ python3 utils/combine_semantics.py
它只是简单地检查移动物体是否属于可移动类别。如果不是,则重新归类为静态。
清理扫描数据
为了使用我们的 LiDAR-MOS 作为掩码来清理 LiDAR 扫描数据,我们也提供了一个在玩具数据集上的快速演示:
$ python3 utils/scan_cleaner.py
里程计/SLAM
使用清理后的 LiDAR 扫描数据,我们发现只需将我们的 MOS 预测结果作为预处理掩码,里程计结果在 KITTI 的训练和测试数据中都有所提升,甚至略好于精心设计的全类别语义增强版 SuMa++。

我们方法的测试结果也可以在 KITTI-里程计基准测试 中找到。
建图
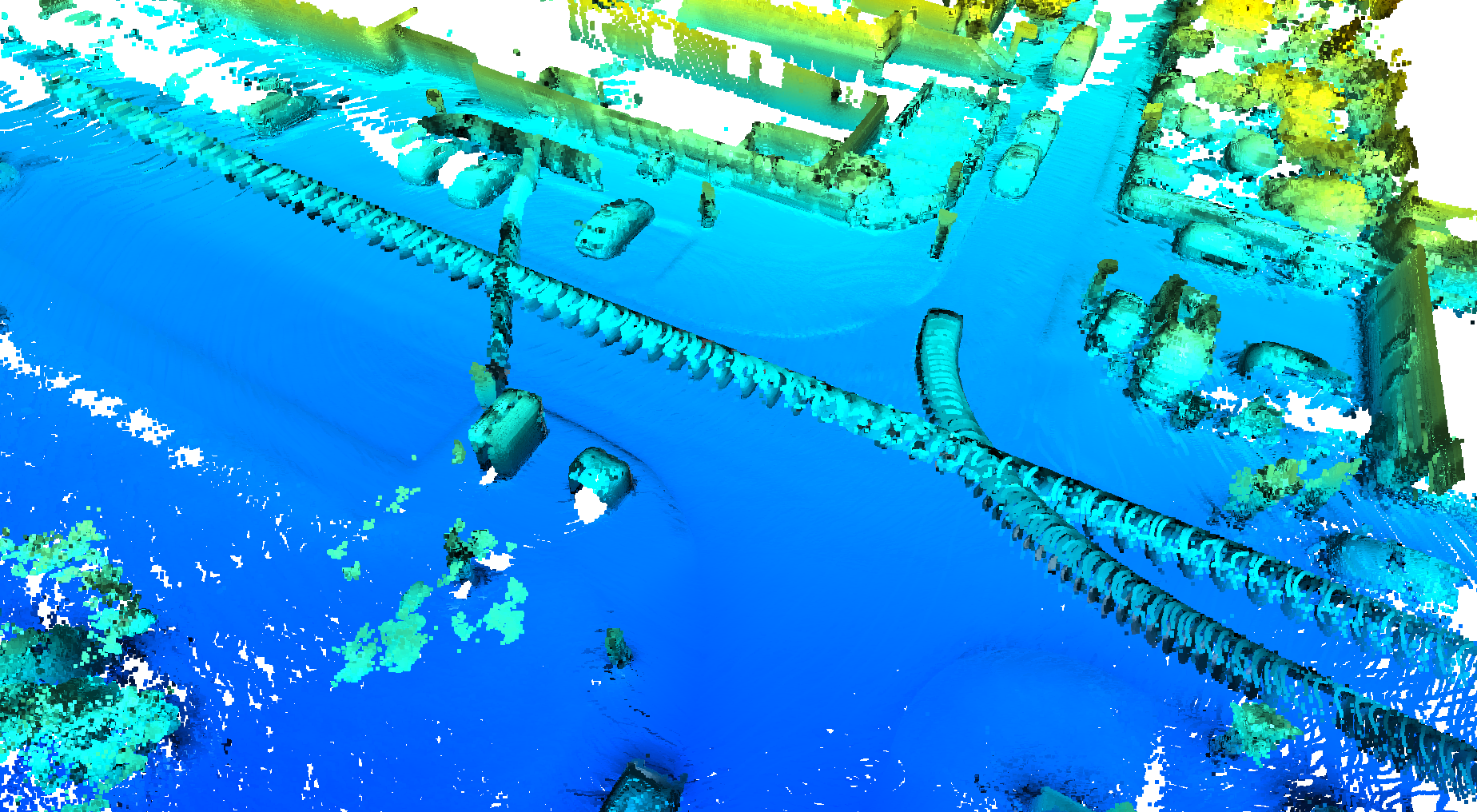
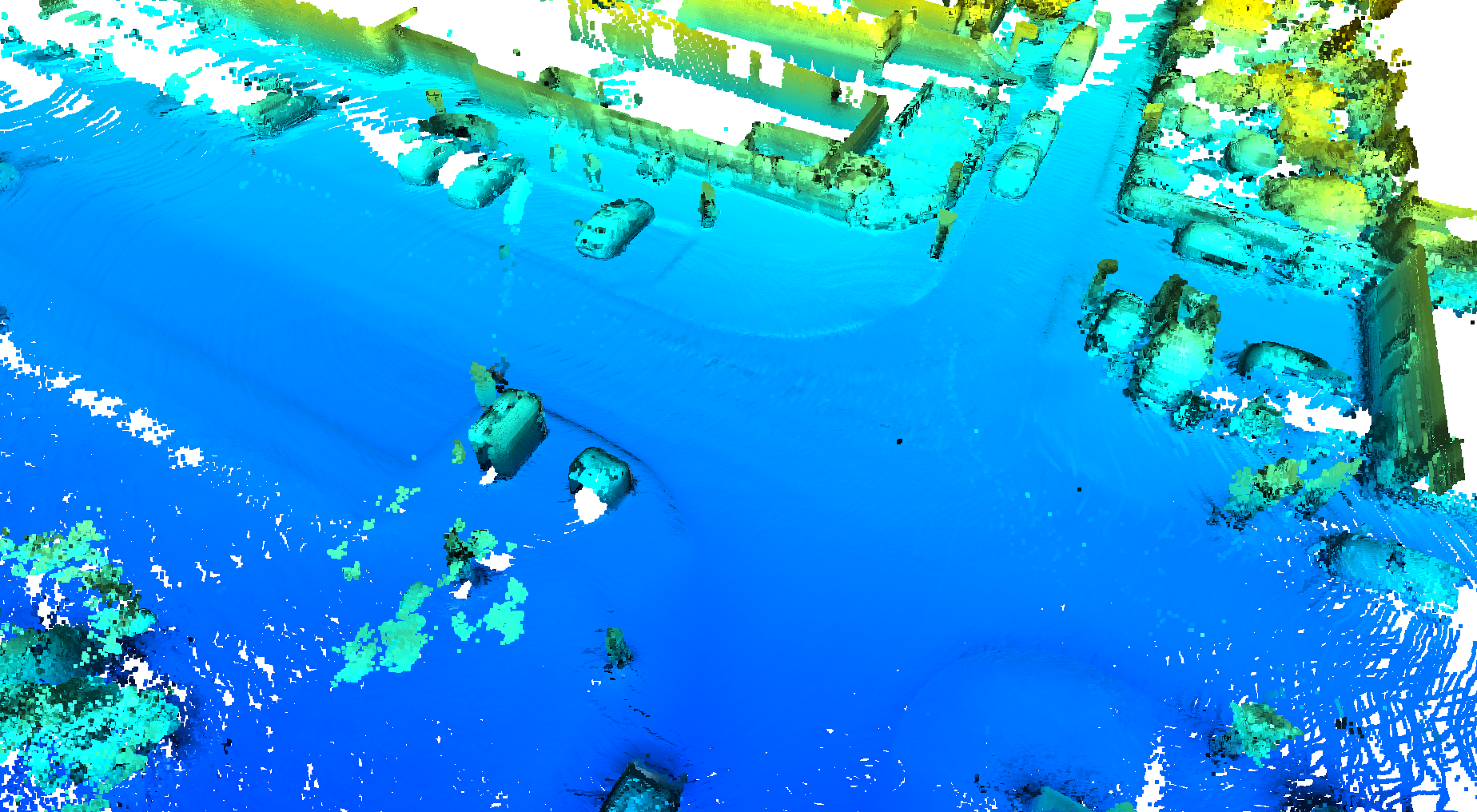
我们将聚合点云地图(左)直接与原始 LiDAR 扫描数据(右)进行比较,并将清理后的 LiDAR 扫描数据与应用了我们的 MOS 预测结果作为掩码的扫描数据进行对比。可以看出,地图中存在移动物体,这些物体会污染地图,在用于定位或路径规划时可能会产生不利影响。通过使用我们的 MOS 预测结果作为掩码,我们可以有效地去除这些干扰因素,得到一张干净的地图。
地图清理
对于离线地图清理,Giseop Kim 将他的 Removert 和 LiDAR-MOS 结合,取得了非常好的效果。更多信息请参见 #28。
下载集合
- LiDAR_MOS_toy_dataset (用于快速演示的玩具数据集)
- predictions_salsanext_semantic (SalsaNext 在所有序列 00-21 上的语义分割结果)
- predictions_salsanext_residual_8_sem (我们的最佳! 使用 SalsaNext 结合 8 张残差图像及语义的 LiDAR-MOS 结果)
- model_rangenet_residual_1 (使用 RangeNet++ 并结合 1 张残差图像的预训练模型)
- model_salsanext_residual_1 (使用 SalsaNext 并结合 1 张残差图像的预训练模型)
- model_salsanext_residual_8 (使用 SalsaNext 并结合 8 张残差图像的预训练模型)
许可证
本项目是根据 MIT 许可证提供的免费软件。详细信息请参阅 LICENSE 文件。
版本历史
v1.12021/09/06v1.02021/09/06常见问题
相似工具推荐
openclaw
OpenClaw 是一款专为个人打造的本地化 AI 助手,旨在让你在自己的设备上拥有完全可控的智能伙伴。它打破了传统 AI 助手局限于特定网页或应用的束缚,能够直接接入你日常使用的各类通讯渠道,包括微信、WhatsApp、Telegram、Discord、iMessage 等数十种平台。无论你在哪个聊天软件中发送消息,OpenClaw 都能即时响应,甚至支持在 macOS、iOS 和 Android 设备上进行语音交互,并提供实时的画布渲染功能供你操控。 这款工具主要解决了用户对数据隐私、响应速度以及“始终在线”体验的需求。通过将 AI 部署在本地,用户无需依赖云端服务即可享受快速、私密的智能辅助,真正实现了“你的数据,你做主”。其独特的技术亮点在于强大的网关架构,将控制平面与核心助手分离,确保跨平台通信的流畅性与扩展性。 OpenClaw 非常适合希望构建个性化工作流的技术爱好者、开发者,以及注重隐私保护且不愿被单一生态绑定的普通用户。只要具备基础的终端操作能力(支持 macOS、Linux 及 Windows WSL2),即可通过简单的命令行引导完成部署。如果你渴望拥有一个懂你
stable-diffusion-webui
stable-diffusion-webui 是一个基于 Gradio 构建的网页版操作界面,旨在让用户能够轻松地在本地运行和使用强大的 Stable Diffusion 图像生成模型。它解决了原始模型依赖命令行、操作门槛高且功能分散的痛点,将复杂的 AI 绘图流程整合进一个直观易用的图形化平台。 无论是希望快速上手的普通创作者、需要精细控制画面细节的设计师,还是想要深入探索模型潜力的开发者与研究人员,都能从中获益。其核心亮点在于极高的功能丰富度:不仅支持文生图、图生图、局部重绘(Inpainting)和外绘(Outpainting)等基础模式,还独创了注意力机制调整、提示词矩阵、负向提示词以及“高清修复”等高级功能。此外,它内置了 GFPGAN 和 CodeFormer 等人脸修复工具,支持多种神经网络放大算法,并允许用户通过插件系统无限扩展能力。即使是显存有限的设备,stable-diffusion-webui 也提供了相应的优化选项,让高质量的 AI 艺术创作变得触手可及。
everything-claude-code
everything-claude-code 是一套专为 AI 编程助手(如 Claude Code、Codex、Cursor 等)打造的高性能优化系统。它不仅仅是一组配置文件,而是一个经过长期实战打磨的完整框架,旨在解决 AI 代理在实际开发中面临的效率低下、记忆丢失、安全隐患及缺乏持续学习能力等核心痛点。 通过引入技能模块化、直觉增强、记忆持久化机制以及内置的安全扫描功能,everything-claude-code 能显著提升 AI 在复杂任务中的表现,帮助开发者构建更稳定、更智能的生产级 AI 代理。其独特的“研究优先”开发理念和针对 Token 消耗的优化策略,使得模型响应更快、成本更低,同时有效防御潜在的攻击向量。 这套工具特别适合软件开发者、AI 研究人员以及希望深度定制 AI 工作流的技术团队使用。无论您是在构建大型代码库,还是需要 AI 协助进行安全审计与自动化测试,everything-claude-code 都能提供强大的底层支持。作为一个曾荣获 Anthropic 黑客大奖的开源项目,它融合了多语言支持与丰富的实战钩子(hooks),让 AI 真正成长为懂上
ComfyUI
ComfyUI 是一款功能强大且高度模块化的视觉 AI 引擎,专为设计和执行复杂的 Stable Diffusion 图像生成流程而打造。它摒弃了传统的代码编写模式,采用直观的节点式流程图界面,让用户通过连接不同的功能模块即可构建个性化的生成管线。 这一设计巧妙解决了高级 AI 绘图工作流配置复杂、灵活性不足的痛点。用户无需具备编程背景,也能自由组合模型、调整参数并实时预览效果,轻松实现从基础文生图到多步骤高清修复等各类复杂任务。ComfyUI 拥有极佳的兼容性,不仅支持 Windows、macOS 和 Linux 全平台,还广泛适配 NVIDIA、AMD、Intel 及苹果 Silicon 等多种硬件架构,并率先支持 SDXL、Flux、SD3 等前沿模型。 无论是希望深入探索算法潜力的研究人员和开发者,还是追求极致创作自由度的设计师与资深 AI 绘画爱好者,ComfyUI 都能提供强大的支持。其独特的模块化架构允许社区不断扩展新功能,使其成为当前最灵活、生态最丰富的开源扩散模型工具之一,帮助用户将创意高效转化为现实。
markitdown
MarkItDown 是一款由微软 AutoGen 团队打造的轻量级 Python 工具,专为将各类文件高效转换为 Markdown 格式而设计。它支持 PDF、Word、Excel、PPT、图片(含 OCR)、音频(含语音转录)、HTML 乃至 YouTube 链接等多种格式的解析,能够精准提取文档中的标题、列表、表格和链接等关键结构信息。 在人工智能应用日益普及的今天,大语言模型(LLM)虽擅长处理文本,却难以直接读取复杂的二进制办公文档。MarkItDown 恰好解决了这一痛点,它将非结构化或半结构化的文件转化为模型“原生理解”且 Token 效率极高的 Markdown 格式,成为连接本地文件与 AI 分析 pipeline 的理想桥梁。此外,它还提供了 MCP(模型上下文协议)服务器,可无缝集成到 Claude Desktop 等 LLM 应用中。 这款工具特别适合开发者、数据科学家及 AI 研究人员使用,尤其是那些需要构建文档检索增强生成(RAG)系统、进行批量文本分析或希望让 AI 助手直接“阅读”本地文件的用户。虽然生成的内容也具备一定可读性,但其核心优势在于为机器
LLMs-from-scratch
LLMs-from-scratch 是一个基于 PyTorch 的开源教育项目,旨在引导用户从零开始一步步构建一个类似 ChatGPT 的大型语言模型(LLM)。它不仅是同名技术著作的官方代码库,更提供了一套完整的实践方案,涵盖模型开发、预训练及微调的全过程。 该项目主要解决了大模型领域“黑盒化”的学习痛点。许多开发者虽能调用现成模型,却难以深入理解其内部架构与训练机制。通过亲手编写每一行核心代码,用户能够透彻掌握 Transformer 架构、注意力机制等关键原理,从而真正理解大模型是如何“思考”的。此外,项目还包含了加载大型预训练权重进行微调的代码,帮助用户将理论知识延伸至实际应用。 LLMs-from-scratch 特别适合希望深入底层原理的 AI 开发者、研究人员以及计算机专业的学生。对于不满足于仅使用 API,而是渴望探究模型构建细节的技术人员而言,这是极佳的学习资源。其独特的技术亮点在于“循序渐进”的教学设计:将复杂的系统工程拆解为清晰的步骤,配合详细的图表与示例,让构建一个虽小但功能完备的大模型变得触手可及。无论你是想夯实理论基础,还是为未来研发更大规模的模型做准备