BoT-SORT
BoT-SORT 是一款高性能的多目标行人跟踪开源工具,旨在解决复杂场景下行人检测与身份维持的难题。在拥挤、遮挡或摄像头移动的环境中,传统算法容易出现目标丢失或身份切换错误,而 BoT-SORT 通过创新性地融合运动信息与外观特征,显著提升了跟踪的鲁棒性。
该工具的核心亮点在于引入了相机运动补偿机制,能够有效抵消摄像头抖动带来的干扰;同时结合了更精准的卡尔曼滤波状态向量与重识别(Re-ID)技术,确保在长时间遮挡后仍能准确找回目标。凭借这些优势,BoT-SORT 在权威的 MOT17 和 MOT20 基准测试中取得了领先的性能表现,多项核心指标均达到业界顶尖水平。此外,它还原生支持 YOLOX 和 YOLOv7 等主流检测器,并具备多类别跟踪能力。
BoT-SORT 主要面向计算机视觉领域的研究人员、算法工程师及开发者。如果你正在从事智能监控、自动驾驶感知或视频分析系统的开发,需要一款在动态环境下依然稳定可靠的跟踪方案,BoT-SORT 将是一个极具价值的选择。其代码基于 ByteTrack 和 FastReID 构建,提供了清晰的安装指南与模块化设计,便于用户进行二次开发与模型部署。
使用场景
某智慧园区安防团队正在部署一套全天候行人监控系统,需要在人流密集的出入口准确统计人数并追踪特定目标轨迹。
没有 BoT-SORT 时
- 频繁丢失目标:当行人被柱子遮挡或多人交叉穿过时,传统算法容易中断跟踪,导致同一个人被记录为多个不同 ID,统计数据严重失真。
- 摄像头抖动干扰:安装在云台或移动巡逻车上的摄像头产生画面抖动时,系统误将背景运动判断为行人移动,产生大量虚假轨迹。
- 外观相似难区分:在穿着统一工服的场景下,仅靠位置预测无法区分两个并排行走的员工,导致身份互换(ID Switch)。
- 复杂场景失效:在早晚高峰的高密度人流中,漏检率飙升,系统无法维持稳定的多目标关联。
使用 BoT-SORT 后
- 鲁棒的关联能力:凭借更精准的状态向量和卡尔曼滤波,BoT-SORT 在遮挡和交叉路径下仍能保持 ID 连续,确保单人单号,统计准确率大幅提升。
- 相机运动补偿:内置的相机运动补偿(GMC)模块有效过滤了设备抖动带来的背景噪声,即使在移动监控视角下也能锁定真实行人轨迹。
- 重识别技术融合:结合 ReID 外观特征,BoT-SORT 能敏锐区分衣着相似的行人,彻底解决了高密度人群中的身份跳变问题。
- 高性能实时追踪:在 MOT17/MOT20 基准测试中领先的 MOTA 和 HOTA 指标,使其在极端拥挤场景下依然保持低漏检和高精度跟踪。
BoT-SORT 通过融合运动与外观信息并补偿相机抖动,将复杂的动态行人追踪转化为稳定可靠的数据流,为安防决策提供坚实支撑。
运行环境要求
- Linux
需要 NVIDIA GPU,测试环境为 CUDA 11.3 (cu113),支持 CPU 或 GPU 版本的 faiss
未说明
快速开始
BoT-SORT
尼尔·阿哈伦、罗伊·奥尔法伊格、本-齐翁·博布罗夫斯基
![]()
![]()
亮点 🚀
- 支持 YOLOX 和 YOLOv7
- 多类别支持
- 相机运动补偿
- 重识别
即将推出
- 为 MOTChallenge 训练好的 YOLOv7 模型。
- YOLOv7 检测器。
- 多类别支持。
- 创建 OpenCV VideoStab GMC 的 Python 绑定,或编写 Python 版本。
- 部署代码。
摘要
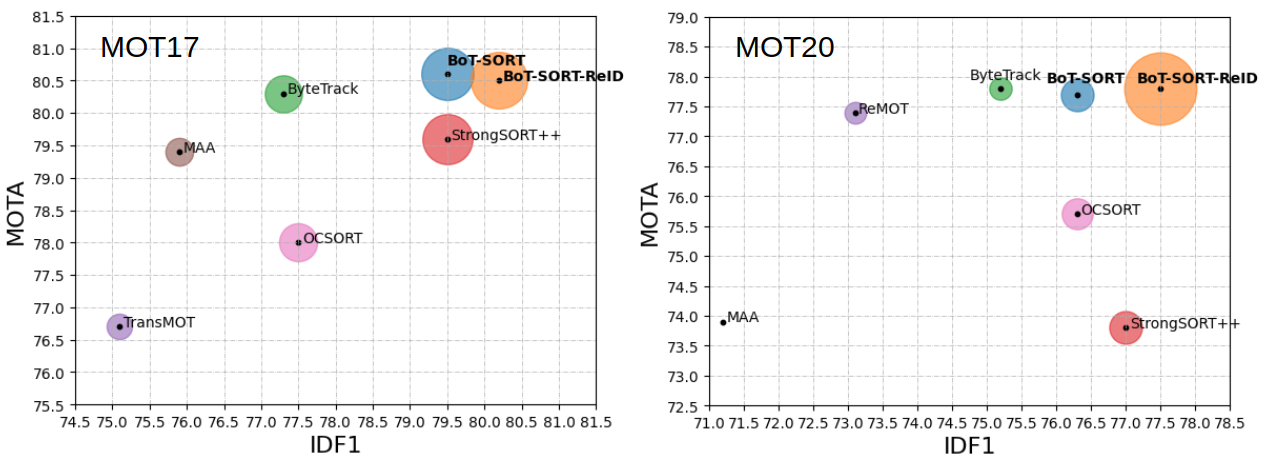
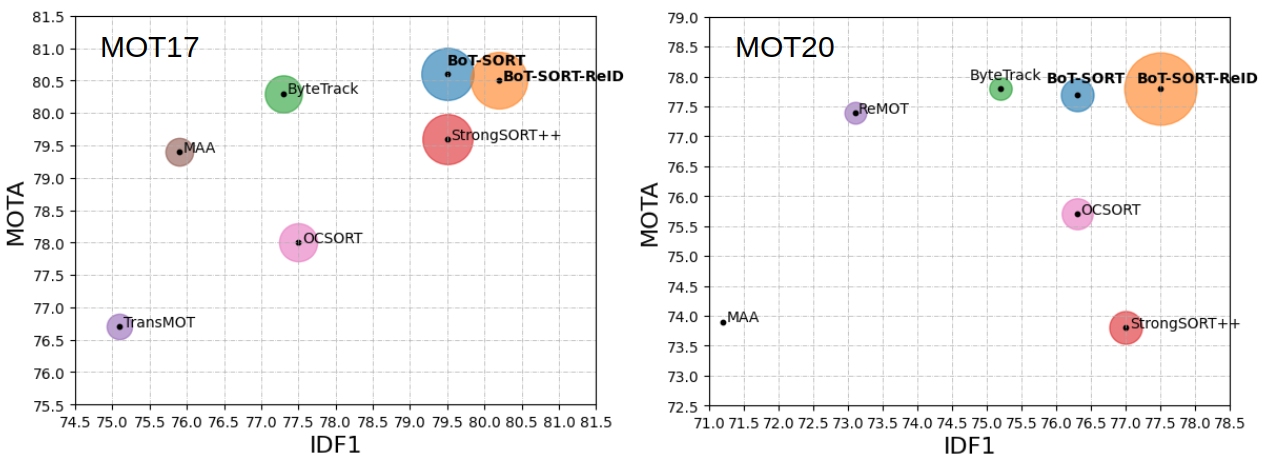
多目标跟踪(MOT)的目标是在场景中检测并跟踪所有目标对象,同时为每个目标保持唯一的标识符。在本文中,我们提出了一种新的、性能先进的鲁棒跟踪器,它能够结合运动和外观信息的优势,并加入相机运动补偿以及更精确的卡尔曼滤波状态向量。我们的新跟踪器 BoT-SORT 和 BoT-SORT-ReID 在 MOTChallenge 数据集 [29, 11] 的 MOT17 和 MOT20 测试集上,在所有主要的 MOT 指标——MOTA、IDF1 和 HOTA——方面均排名第一。对于 MOT17 数据集,我们取得了 80.5 的 MOTA、80.2 的 IDF1 和 65.0 的 HOTA。
MOT 挑战赛测试集上的可视化结果
跟踪性能
MOT17 挑战赛测试集的结果
| 跟踪器 | MOTA | IDF1 | HOTA |
|---|---|---|---|
| BoT-SORT | 80.6 | 79.5 | 64.6 |
| BoT-SORT-ReID | 80.5 | 80.2 | 65.0 |
MOT20 挑战赛测试集的结果
| 跟踪器 | MOTA | IDF1 | HOTA |
|---|---|---|---|
| BoT-SORT | 77.7 | 76.3 | 62.6 |
| BoT-SORT-ReID | 77.8 | 77.5 | 63.3 |
安装
该代码已在 Ubuntu 20.04 上测试通过。
BoT-SORT 代码基于 ByteTrack 和 FastReID。
请访问它们的安装指南以获取更多设置选项。
使用 Anaconda 进行设置
步骤 1. 创建 Conda 环境并安装 PyTorch。
conda create -n botsort_env python=3.7
conda activate botsort_env
步骤 2. 从 pytorch.org 安装匹配的 PyTorch 和 torchvision。
代码使用 torch 1.11.0+cu113 和 torchvision==0.12.0 进行了测试。
步骤 3. 安装 BoT-SORT。
git clone https://github.com/NirAharon/BoT-SORT.git
cd BoT-SORT
pip3 install -r requirements.txt
python3 setup.py develop
步骤 4. 安装 pycocotools。
pip3 install cython; pip3 install 'git+https://github.com/cocodataset/cocoapi.git#subdirectory=PythonAPI'
步骤 5. 其他
# Cython-bbox
pip3 install cython_bbox
# faiss cpu / gpu
pip3 install faiss-cpu
pip3 install faiss-gpu
数据准备
从 MOT17 和 MOT20 的官方网站下载数据,并将其放置在以下结构中:
<dataets_dir>
│
├── MOT17
│ ├── train
│ └── test
│
└── MOT20
├── train
└── test
为了训练 ReID,必须按如下方式生成检测补丁:
cd <BoT-SORT_dir>
# 对于 MOT17
python3 fast_reid/datasets/generate_mot_patches.py --data_path <dataets_dir> --mot 17
# 对于 MOT20
python3 fast_reid/datasets/generate_mot_patches.py --data_path <dataets_dir> --mot 20
将数据集链接到 FastReID export FASTREID_DATASETS=<BoT-SORT_dir>/fast_reid/datasets. 如果未设置,则默认为 fast_reid/datasets
模型库
下载并存储训练好的模型到 'pretrained' 文件夹中,如下所示:
<BoT-SORT_dir>/pretrained
我们使用了公开可用的 ByteTrack 模型库,该库在 MOT17、MOT20 以及 YOLOX 目标检测的消融实验上进行了训练。
我们的训练好的 ReID 模型可以从 MOT17-SBS-S50 和 MOT20-SBS-S50 下载。
训练
训练 ReID 模块
在按照“数据准备”部分所述生成 MOT ReID 数据集之后。
cd <BoT-SORT_dir>
# 用于训练 MOT17
python3 fast_reid/tools/train_net.py --config-file ./fast_reid/configs/MOT17/sbs_S50.yml MODEL.DEVICE "cuda:0"
# 用于训练 MOT20
python3 fast_reid/tools/train_net.py --config-file ./fast_reid/configs/MOT20/sbs_S50.yml MODEL.DEVICE "cuda:0"
有关更多说明和选项,请参阅 FastReID 仓库。
跟踪
只需将本部分生成的 txt 文件提交至 MOTChallenge 网站,即可获得与论文中相同的结果。
仔细调整跟踪参数可能会带来更高的性能。在论文中,我们采用了 ByteTrack 的校准方法。
- 在 MOT17 上测试
cd <BoT-SORT_dir>
python3 tools/track.py <dataets_dir/MOT17> --default-parameters --with-reid --benchmark "MOT17" --eval "test" --fp16 --fuse
python3 tools/interpolation.py --txt_path <path_to_track_result>
- 在 MOT20 上测试
cd <BoT-SORT_dir>
python3 tools/track.py <dataets_dir/MOT20> --default-parameters --with-reid --benchmark "MOT20" --eval "test" --fp16 --fuse
python3 tools/interpolation.py --txt_path <path_to_track_result>
- 在 MOT17 验证集上评估(训练集的后半部分)
cd <BoT-SORT_dir>
# BoT-SORT
python3 tools/track.py <dataets_dir/MOT17> --default-parameters --benchmark "MOT17" --eval "val" --fp16 --fuse
# BoT-SORT-ReID
python3 tools/track.py <dataets_dir/MOT17> --default-parameters --with-reid --benchmark "MOT17" --eval "val" --fp16 --fuse
- 其他实验
可以使用其他参数,__无需__传递 --default-parameters 标志。
对于训练集和验证集的评估,我们建议使用来自 TrackEval 的官方 MOTChallenge 评估代码。
# 如需查看所有可用的跟踪参数,请运行:
python3 tools/track.py -h
- 使用 YOLOv7 的实验
可以使用其他参数,__无需__传递 --default-parameters 标志。
对于训练集和验证集的评估,我们建议使用来自 TrackEval 的官方 MOTChallenge 评估代码。
# 如需查看所有可用的跟踪参数,请运行:
python3 tools/track_yolov7.py -h
演示
基于 BoT-SORT(-ReID) 的 YOLOX 多类别演示。
cd <BoT-SORT_dir>
# 原始示例
python3 tools/demo.py video --path <视频路径> -f yolox/exps/example/mot/yolox_x_mix_det.py -c pretrained/bytetrack_x_mot17.pth.tar --with-reid --fuse-score --fp16 --fuse --save_result
# 多类别示例
python3 tools/mc_demo.py video --path <视频路径> -f yolox/exps/example/mot/yolox_x_mix_det.py -c pretrained/bytetrack_x_mot17.pth.tar --with-reid --fuse-score --fp16 --fuse --save_result
基于 BoT-SORT(-ReID) 的 YOLOv7 多类别演示。
cd <BoT-SORT_dir>
python3 tools/mc_demo_yolov7.py --weights pretrained/yolov7-d6.pt --source <视频/图片路径> --fuse-score --agnostic-nms (--with-reid)
注意事项
我们的相机运动补偿模块基于 OpenCV contrib C++ 版本的 VideoStab 全局运动估计,目前尚无 Python 版本。
可在 GMC 文件夹中的名为 'VideoCameraCorrection' 的 C++ 项目中生成运动文件。
生成的文件可供跟踪器使用。
此外,也有基于 Python 的运动估计技术可供选择,可通过向 demo.py 或 track.py 传递
'--cmc-method' <files | orb | ecc> 来指定。
引用
@article{aharon2022bot,
title={BoT-SORT: Robust Associations Multi-Pedestrian Tracking},
author={Aharon, Nir and Orfaig, Roy and Bobrovsky, Ben-Zion},
journal={arXiv preprint arXiv:2206.14651},
year={2022}
}
致谢
大量代码、思路和成果均借鉴自
ByteTrack、
StrongSORT、
FastReID、
YOLOX 和
YOLOv7。
感谢他们的杰出工作!
常见问题
相似工具推荐
openclaw
OpenClaw 是一款专为个人打造的本地化 AI 助手,旨在让你在自己的设备上拥有完全可控的智能伙伴。它打破了传统 AI 助手局限于特定网页或应用的束缚,能够直接接入你日常使用的各类通讯渠道,包括微信、WhatsApp、Telegram、Discord、iMessage 等数十种平台。无论你在哪个聊天软件中发送消息,OpenClaw 都能即时响应,甚至支持在 macOS、iOS 和 Android 设备上进行语音交互,并提供实时的画布渲染功能供你操控。 这款工具主要解决了用户对数据隐私、响应速度以及“始终在线”体验的需求。通过将 AI 部署在本地,用户无需依赖云端服务即可享受快速、私密的智能辅助,真正实现了“你的数据,你做主”。其独特的技术亮点在于强大的网关架构,将控制平面与核心助手分离,确保跨平台通信的流畅性与扩展性。 OpenClaw 非常适合希望构建个性化工作流的技术爱好者、开发者,以及注重隐私保护且不愿被单一生态绑定的普通用户。只要具备基础的终端操作能力(支持 macOS、Linux 及 Windows WSL2),即可通过简单的命令行引导完成部署。如果你渴望拥有一个懂你
stable-diffusion-webui
stable-diffusion-webui 是一个基于 Gradio 构建的网页版操作界面,旨在让用户能够轻松地在本地运行和使用强大的 Stable Diffusion 图像生成模型。它解决了原始模型依赖命令行、操作门槛高且功能分散的痛点,将复杂的 AI 绘图流程整合进一个直观易用的图形化平台。 无论是希望快速上手的普通创作者、需要精细控制画面细节的设计师,还是想要深入探索模型潜力的开发者与研究人员,都能从中获益。其核心亮点在于极高的功能丰富度:不仅支持文生图、图生图、局部重绘(Inpainting)和外绘(Outpainting)等基础模式,还独创了注意力机制调整、提示词矩阵、负向提示词以及“高清修复”等高级功能。此外,它内置了 GFPGAN 和 CodeFormer 等人脸修复工具,支持多种神经网络放大算法,并允许用户通过插件系统无限扩展能力。即使是显存有限的设备,stable-diffusion-webui 也提供了相应的优化选项,让高质量的 AI 艺术创作变得触手可及。
everything-claude-code
everything-claude-code 是一套专为 AI 编程助手(如 Claude Code、Codex、Cursor 等)打造的高性能优化系统。它不仅仅是一组配置文件,而是一个经过长期实战打磨的完整框架,旨在解决 AI 代理在实际开发中面临的效率低下、记忆丢失、安全隐患及缺乏持续学习能力等核心痛点。 通过引入技能模块化、直觉增强、记忆持久化机制以及内置的安全扫描功能,everything-claude-code 能显著提升 AI 在复杂任务中的表现,帮助开发者构建更稳定、更智能的生产级 AI 代理。其独特的“研究优先”开发理念和针对 Token 消耗的优化策略,使得模型响应更快、成本更低,同时有效防御潜在的攻击向量。 这套工具特别适合软件开发者、AI 研究人员以及希望深度定制 AI 工作流的技术团队使用。无论您是在构建大型代码库,还是需要 AI 协助进行安全审计与自动化测试,everything-claude-code 都能提供强大的底层支持。作为一个曾荣获 Anthropic 黑客大奖的开源项目,它融合了多语言支持与丰富的实战钩子(hooks),让 AI 真正成长为懂上
ComfyUI
ComfyUI 是一款功能强大且高度模块化的视觉 AI 引擎,专为设计和执行复杂的 Stable Diffusion 图像生成流程而打造。它摒弃了传统的代码编写模式,采用直观的节点式流程图界面,让用户通过连接不同的功能模块即可构建个性化的生成管线。 这一设计巧妙解决了高级 AI 绘图工作流配置复杂、灵活性不足的痛点。用户无需具备编程背景,也能自由组合模型、调整参数并实时预览效果,轻松实现从基础文生图到多步骤高清修复等各类复杂任务。ComfyUI 拥有极佳的兼容性,不仅支持 Windows、macOS 和 Linux 全平台,还广泛适配 NVIDIA、AMD、Intel 及苹果 Silicon 等多种硬件架构,并率先支持 SDXL、Flux、SD3 等前沿模型。 无论是希望深入探索算法潜力的研究人员和开发者,还是追求极致创作自由度的设计师与资深 AI 绘画爱好者,ComfyUI 都能提供强大的支持。其独特的模块化架构允许社区不断扩展新功能,使其成为当前最灵活、生态最丰富的开源扩散模型工具之一,帮助用户将创意高效转化为现实。
gemini-cli
gemini-cli 是一款由谷歌推出的开源 AI 命令行工具,它将强大的 Gemini 大模型能力直接集成到用户的终端环境中。对于习惯在命令行工作的开发者而言,它提供了一条从输入提示词到获取模型响应的最短路径,无需切换窗口即可享受智能辅助。 这款工具主要解决了开发过程中频繁上下文切换的痛点,让用户能在熟悉的终端界面内直接完成代码理解、生成、调试以及自动化运维任务。无论是查询大型代码库、根据草图生成应用,还是执行复杂的 Git 操作,gemini-cli 都能通过自然语言指令高效处理。 它特别适合广大软件工程师、DevOps 人员及技术研究人员使用。其核心亮点包括支持高达 100 万 token 的超长上下文窗口,具备出色的逻辑推理能力;内置 Google 搜索、文件操作及 Shell 命令执行等实用工具;更独特的是,它支持 MCP(模型上下文协议),允许用户灵活扩展自定义集成,连接如图像生成等外部能力。此外,个人谷歌账号即可享受免费的额度支持,且项目基于 Apache 2.0 协议完全开源,是提升终端工作效率的理想助手。
markitdown
MarkItDown 是一款由微软 AutoGen 团队打造的轻量级 Python 工具,专为将各类文件高效转换为 Markdown 格式而设计。它支持 PDF、Word、Excel、PPT、图片(含 OCR)、音频(含语音转录)、HTML 乃至 YouTube 链接等多种格式的解析,能够精准提取文档中的标题、列表、表格和链接等关键结构信息。 在人工智能应用日益普及的今天,大语言模型(LLM)虽擅长处理文本,却难以直接读取复杂的二进制办公文档。MarkItDown 恰好解决了这一痛点,它将非结构化或半结构化的文件转化为模型“原生理解”且 Token 效率极高的 Markdown 格式,成为连接本地文件与 AI 分析 pipeline 的理想桥梁。此外,它还提供了 MCP(模型上下文协议)服务器,可无缝集成到 Claude Desktop 等 LLM 应用中。 这款工具特别适合开发者、数据科学家及 AI 研究人员使用,尤其是那些需要构建文档检索增强生成(RAG)系统、进行批量文本分析或希望让 AI 助手直接“阅读”本地文件的用户。虽然生成的内容也具备一定可读性,但其核心优势在于为机器