points2surf
Points2Surf 是一款基于深度学习的开源工具,旨在从稀疏或含噪的点云数据中重建高质量的三维隐式曲面。它通过神经网络估算符号距离函数(SDF),并利用移动立方体算法将其转化为网格模型,有效解决了传统方法在处理复杂几何形状时细节丢失或拓扑错误的问题。
该工具特别适合计算机图形学研究人员、3D 视觉开发者以及需要高精度三维重建的专业人士使用。与 DeepSDF 或 AtlasNet 等依赖特定物体类别的方法不同,Points2Surf 采用了独特的“基于补丁”(patch-based)架构。这一设计使其不局限于特定物体类别,具备极强的泛化能力,能够更准确地还原任意形状的细节,甚至在多数场景下优于经典的屏幕泊松表面重建算法。作为 ECCV 2020 的亮点论文成果,Points2Surf 为学术界和工业界提供了一套高效、通用的点云至网格解决方案,帮助用户轻松获得比现有主流技术更优的重建效果。
使用场景
某工业逆向工程团队正试图将老旧机械零件的激光扫描点云数据转化为可用于 CAD 修改的高精度网格模型。
没有 points2surf 时
- 泛化能力差:传统深度学习模型(如 DeepSDF)严重依赖特定物体类别训练,面对从未见过的复杂机械零件时,重建效果急剧下降。
- 细节丢失严重:基于泊松重建等传统算法在处理稀疏或含噪点云时,容易抹平锐利边缘和微小几何特征,导致零件无法精确装配。
- 流程繁琐低效:工程师需要针对不同形状的零件手动调整重建参数或混合使用多种软件,耗时数小时仍难以获得封闭、水密的网格。
使用 points2surf 后
- 类别无关的高精度重建:points2surf 采用基于补丁(patch-based)的学习架构,无需针对特定零件类别重新训练,即可直接从任意点云推断出精确的符号距离场(SDF)。
- 完美保留几何特征:即使在点云存在噪声或缺失的情况下,points2surf 也能通过 Marching Cubes 算法生成拓扑正确且边缘锐利的网格,还原零件的真实细节。
- 自动化工作流:只需运行预训练模型脚本,即可在标准显卡上自动完成从原始点云到高质量网格的全流程,将单件处理时间从数小时缩短至分钟级。
points2surf 通过其卓越的泛化能力和对隐式表面的精准学习,彻底解决了非标准工业零件从扫描数据到可用网格模型的自动化重建难题。
运行环境要求
- Linux
- Windows
- 如果使用 GPU 则需要 NVIDIA GPU 及 CUDA 和 CuDNN
- 文中测试示例提到使用 GTX 1070 (8GB) 或 RTX 2080Ti
- 具体显存大小未明确说明,但需支持 PyTorch 运行
未说明
快速开始
Points2Surf: 从点云中学习隐式曲面(ECCV 2020 Spotlight)
请参阅我们的后续工作 PPSurf。它使用起来更简单、速度更快,效果也更好。
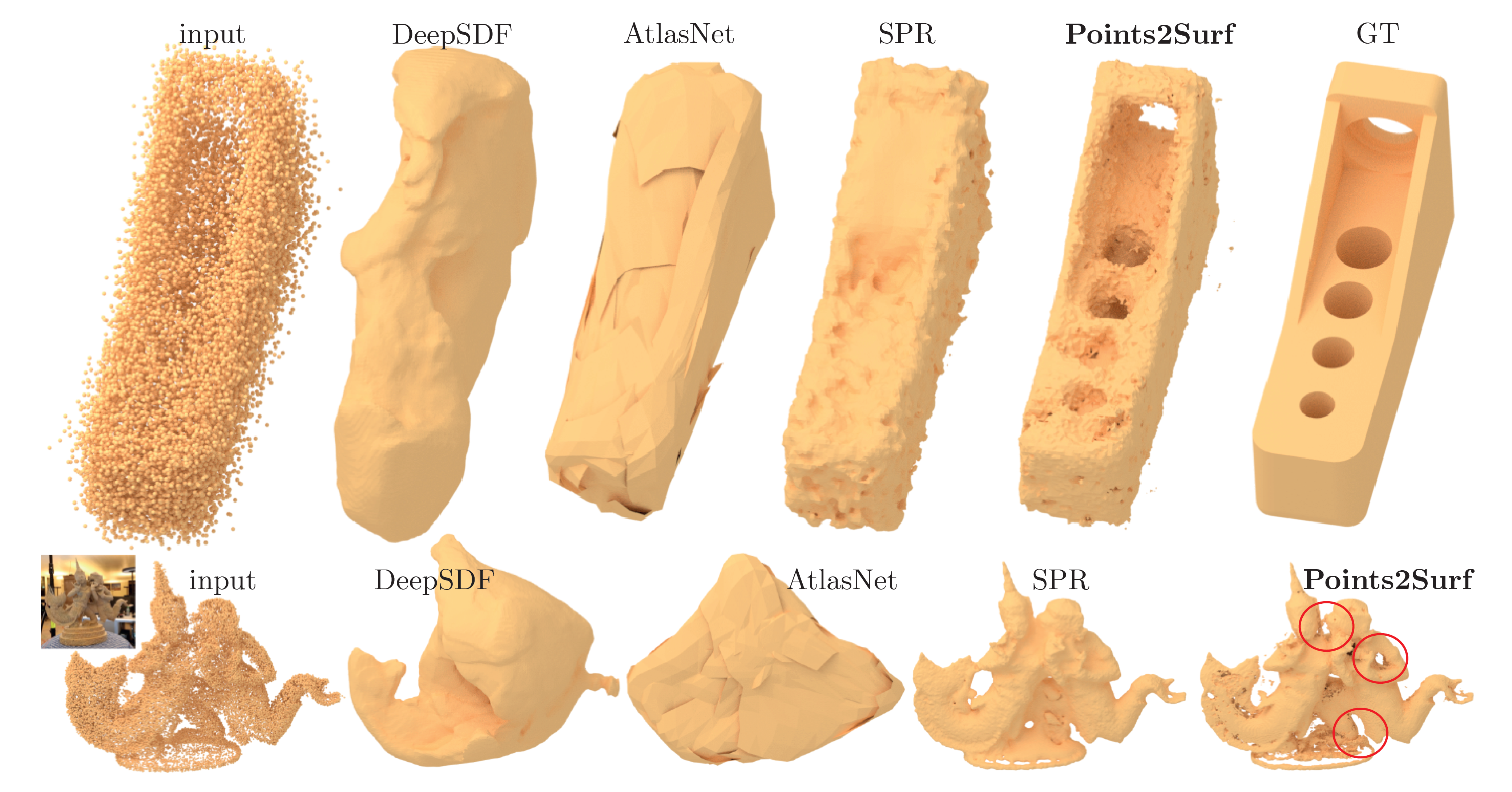
这是我们对 Points2Surf 的实现,该网络能够从点云中估计有符号距离函数。此 SDF 通过 Marching Cubes 算法转换为网格。更多详情,请观看 短视频 和 长视频。
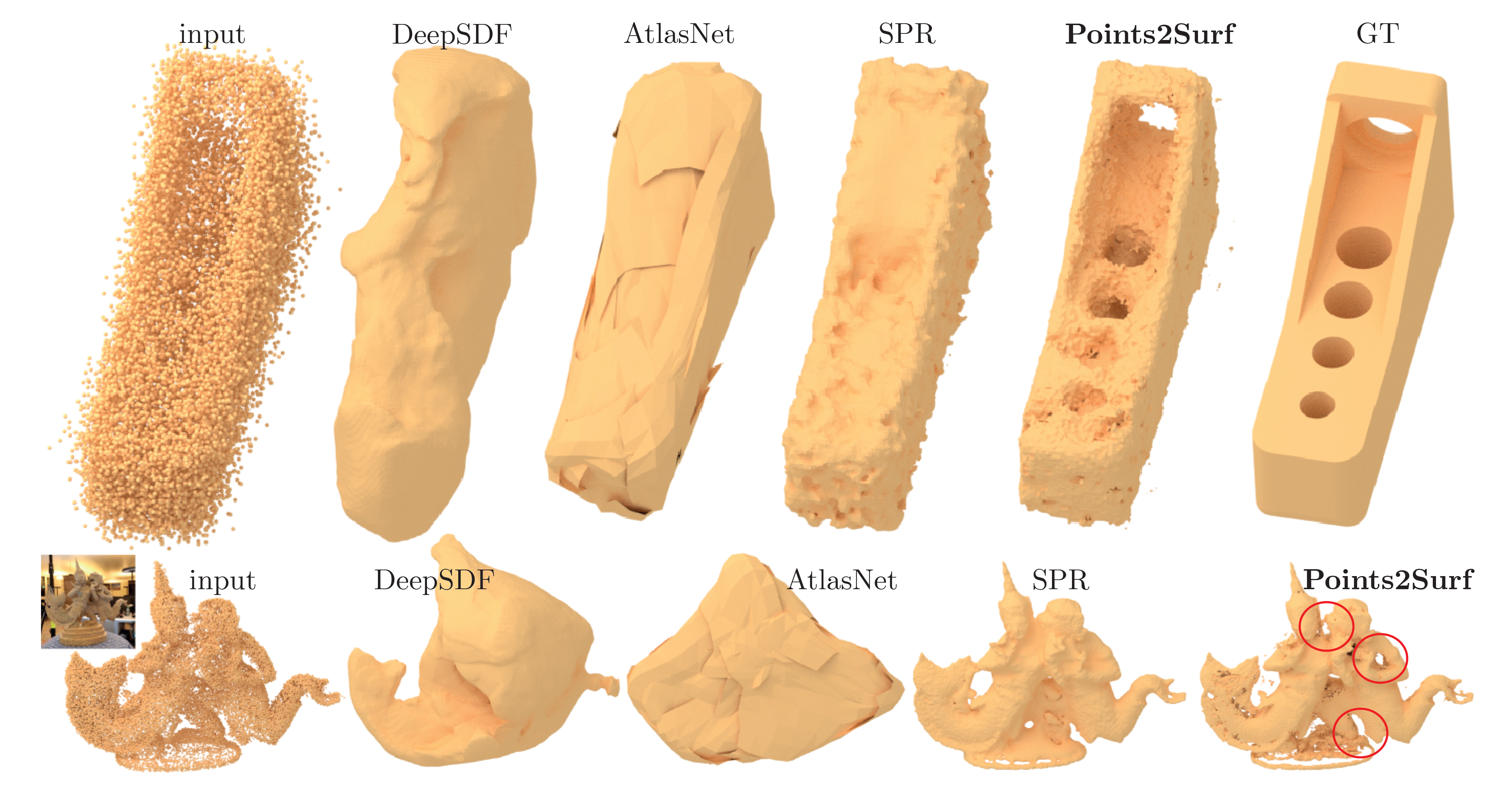
该架构与 PCPNet 类似。与其他基于机器学习的曲面重建方法不同,例如 DeepSDF 和 AtlasNet,Points2Surf 是基于补丁的方法,因此不依赖于特定类别。其显著增强的泛化能力带来了更好的结果,在大多数情况下甚至优于 Screened Poisson Surface Reconstruction。
这段代码主要由 Philipp Erler 和 Paul Guerrero 编写。本研究发表于 ECCV 2020。
前置条件
- Python >= 3.7
- PyTorch >= 1.6
- 如果使用 GPU,则需要 CUDA 和 CuDNN
- BlenSor 1.0.18 RC 10 用于数据集生成
快速入门
要获得一个用于训练和重建的最小示例,请按照以下步骤操作。我们建议使用 Anaconda 来管理 Python 环境。否则,您可以使用 Pip 按照 requirements.txt 中的说明安装所需的包。
# 克隆此仓库
# 其中包含一个最小数据集(2 个形状用于训练,1 个用于评估)
git clone https://github.com/ErlerPhilipp/points2surf.git
# 进入克隆后的目录
cd points2surf
# 创建一个包含所需包的 conda 环境
conda env create --file p2s.yml
# 激活新的 conda 环境
conda activate p2s
# 使用默认设置训练并评估原始模型
python full_run.py
从我们的点云中重建曲面
从点云中重建网格以复现我们的结果:
# 下载测试数据集
python datasets/download_datasets_abc.py
python datasets/download_datasets_famous.py
python datasets/download_datasets_thingi10k.py
python datasets/download_datasets_real_world.py
# 下载预训练模型
python models/download_models_vanilla.py
python models/download_models_ablation.py
python models/download_models_max.py
# 启动每个模型的评估
# Points2Surf 主模型,训练 150 个 epoch
bash experiments/eval_p2s_vanilla.sh
# 消融实验模型,训练 50 个 epoch
bash experiments/eval_p2s_small_radius.sh
bash experiments/eval_p2s_medium_radius.sh
bash experiments/eval_p2s_large_radius.sh
bash experiments/eval_p2s_small_kNN.sh
bash experiments/eval_p2s_large_kNN.sh
bash experiments/eval_p2s_shared_transformer.sh
bash experiments/eval_p2s_no_qstn.sh
bash experiments/eval_p2s_uniform.sh
bash experiments/eval_p2s_vanilla_ablation.sh
# 额外的消融实验模型,训练 50 个 epoch
bash experiments/eval_p2s_regression.sh
bash experiments/eval_p2s_shared_encoder.sh
# 基于消融实验结果的最佳模型,训练 250 个 epoch
bash experiments/eval_p2s_max.sh
每个评估脚本都会使用指定的模型重建所有测试集。在一台配备 1070 GTX 显卡且网格分辨率为 256 的普通 PC 上,运行一次评估大约需要一天时间。
为了获得最佳效果,请使用 Max 模型。它比 Vanilla 模型小 15%,并且在所有测试集上的平均 Chamfer 距离上提高了 4%。该模型避免了 QSTN,并采用了均匀的子采样。
使用我们的数据集进行训练
要使用我们的训练集训练论文中的 P2S 模型:
# 下载 ABC 训练和验证数据集
python datasets/download_datasets_abc_training.py
# 启动每个模型的训练
# Points2Surf 主模型,训练 150 个 epoch
bash experiments/train_p2s_vanilla.sh
# 消融实验模型,训练 50 个 epoch
bash experiments/train_p2s_small_radius.sh
bash experiments/train_p2s_medium_radius.sh
bash experiments/train_p2s_large_radius.sh
bash experiments/train_p2s_small_kNN.sh
bash experiments/train_p2s_large_kNN.sh
bash experiments/train_p2s_shared_transformer.sh
bash experiments/train_p2s_no_qstn.sh
bash experiments/train_p2s_uniform.sh
bash experiments/train_p2s_vanilla_ablation.sh
# 额外的消融实验模型,训练 50 个 epoch
bash experiments/train_p2s_regression.sh
bash experiments/train_p2s_shared_encoder.sh
# 基于消融实验结果的最佳模型,训练 250 个 epoch
bash experiments/train_p2s_max.sh
我们使用 4 张 RTX 2080Ti 显卡,大约用了 5 天时间训练到 150 个 epoch。完全收敛通常需要 200 到 250 个 epoch,但此时 Chamfer 距离的变化已经不大了。不过,拓扑噪声可能会有所减少。
默认会使用 TensorBoard 记录损失(绝对距离、符号 logits 以及两者)。此外,我们还会记录符号预测的准确率、召回率和 F1 分数。您可以通过以下命令启动 TensorBoard 服务器:
bash start_tensorboard.sh
制作您自己的数据集
点云以 np.float32 类型的 NumPy 数组形式存储,文件扩展名为 .npy,每行包含一个点的 3 个坐标。点云需要归一化到 (-1..+1) 范围内。
数据集由一个文本文件组成,每行包含一个点云文件的名称(不含扩展名)。文件名是相对于文本文件所在位置给出的。
用于训练与重建的网格数据集
要从网格创建自己的数据集,请将真值网格放置在 ./datasets/(DATASET_NAME)/00_base_meshes/ 目录下。网格必须是 Trimesh 可加载的格式,例如 .ply、.stl、.obj 或 .off。由于我们需要为训练集计算有符号距离,这些输入网格必须表示实体模型,即必须是流形且无漏水的。像 ABC 数据集 中那样的三角化 CAD 对象在大多数情况下都可以使用。接下来,在 ./datasets/(DATASET_NAME)/settings.ini 文件中创建以下设置:
[general]
only_for_evaluation = 0
grid_resolution = 256
epsilon = 5
num_scans_per_mesh_min = 5
num_scans_per_mesh_max = 30
scanner_noise_sigma_min = 0.0
scanner_noise_sigma_max = 0.05
当您将 only_for_evaluation = 1 时,数据集准备脚本会跳过大部分处理步骤,仅生成测试集的文本文件。
对于点云采样,我们使用了 BlenSor 1.0.18 RC 10。Windows 用户需要修复 BlenSor 代码中的一个错误。请确保 make_dataset.py 中的 blensor_bin 变量指向您的 BlenSor 可执行文件,例如 blensor_bin = "bin/Blensor-x64.AppImage"。
您可能需要更改其他路径或工作进程的数量,然后运行:
python make_dataset.py
包含约 5,000 个形状的 ABC 变噪声数据集,在 Ryzen 7 处理器上使用 15 个工作进程大约需要 8 小时。大部分计算时间都花在采样和真值有符号距离的计算上。
用于重建的点云数据集
如果您只想重建自己的点云,请将其放置在 ./datasets/(DATASET_NAME)/00_base_pc/ 目录下。支持的文件类型与网格相同。
您需要在 make_pc_dataset.py 中更改一些设置,例如数据集名称和工作进程数量,然后运行:
python make_pc_dataset.py
手动创建的重建数据集
如果您已经拥有 Numpy 格式的点云文件,可以手动创建数据集。将 *.npy 文件放入 (DATASET_NAME)/04_pts/ 目录中。然后,将文件名(不带扩展名,每行一个)列在一个文本文件 (DATASET_NAME)/testset.txt 中。
相关工作
Kazhdan, Michael, and Hugues Hoppe. "Screened poisson surface reconstruction." ACM Transactions on Graphics (ToG) 32.3 (2013): 1-13.
这项工作是表面重建领域最重要的基准方法。它通过拟合曲面来处理点云数据。
Groueix, Thibault, et al. "A papier-mâché approach to learning 3d surface generation." Proceedings of the IEEE conference on computer vision and pattern recognition. 2018.
这是最早的数据驱动型表面重建方法之一。它通过学习用“补丁”——变形并细分的矩形——来近似物体。
Park, Jeong Joon, et al. "Deepsdf: Learning continuous signed distance functions for shape representation." Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition. 2019.
这也是早期的数据驱动型表面重建方法之一。它通过学习从点数据中近似有符号距离函数来实现重建。
Chabra, Rohan, et al. "Deep Local Shapes: Learning Local SDF Priors for Detailed 3D Reconstruction." arXiv preprint arXiv:2003.10983 (2020).
这项同期研究采用了与我们类似的方法。它能够生成平滑的表面,但需要点法线信息。
最新消息
2025-08-02:在数据集生成中添加扫描仪位姿和曲面法线。请参阅 make_dataset.py,了解如何提取和使用这些信息的示例。
引用
如果您使用我们的工作,请引用我们的论文:
@InProceedings{ErlerEtAl:Points2Surf:ECCV:2020,
title = {{Points2Surf}: 从点云中学习隐式曲面},
author="Erler, Philipp
and Guerrero, Paul
and Ohrhallinger, Stefan
and Mitra, Niloy J.
and Wimmer, Michael",
editor="Vedaldi, Andrea
and Bischof, Horst
and Brox, Thomas
and Frahm, Jan-Michael",
year = {2020},
booktitle="计算机视觉 -- ECCV 2020",
publisher="Springer International Publishing",
address="Cham",
pages="108--124",
abstract="任何基于扫描的资产创建流程中,关键一步都是将无序点云转换为曲面。传统方法(如泊松重建)在面对噪声大或不完整的扫描数据时性能会下降。因此,近年来出现了基于深度学习的方法,即使在部分扫描的情况下也能生成完整的曲面。然而,这类数据驱动方法往往难以推广到具有较大几何和拓扑差异的新形状。我们提出了 Points2Surf,这是一种新颖的基于补丁的学习框架,可以直接从原始扫描数据中生成精确的曲面,而无需点法线信息。通过对详细局部补丁和粗略全局信息的组合进行先验学习,可以显著提升泛化能力和重建精度。我们在合成数据和真实数据上的广泛对比表明,与现有最先进方法相比,我们的方法在未见过的类别上具有明显优势(平均而言,Points2Surf 比 SPR 的重建误差低 30%,比基于深度学习的最先进方法低 270% 以上),尽管计算时间较长,并且在某些情况下可能会出现少量的拓扑噪声。我们的源代码、预训练模型和数据集可在以下网址获取:https://github.com/ErlerPhilipp/points2surf。",
isbn="978-3-030-58558-7"
doi = {10.1007/978-3-030-58558-7_7},
}
常见问题
相似工具推荐
openclaw
OpenClaw 是一款专为个人打造的本地化 AI 助手,旨在让你在自己的设备上拥有完全可控的智能伙伴。它打破了传统 AI 助手局限于特定网页或应用的束缚,能够直接接入你日常使用的各类通讯渠道,包括微信、WhatsApp、Telegram、Discord、iMessage 等数十种平台。无论你在哪个聊天软件中发送消息,OpenClaw 都能即时响应,甚至支持在 macOS、iOS 和 Android 设备上进行语音交互,并提供实时的画布渲染功能供你操控。 这款工具主要解决了用户对数据隐私、响应速度以及“始终在线”体验的需求。通过将 AI 部署在本地,用户无需依赖云端服务即可享受快速、私密的智能辅助,真正实现了“你的数据,你做主”。其独特的技术亮点在于强大的网关架构,将控制平面与核心助手分离,确保跨平台通信的流畅性与扩展性。 OpenClaw 非常适合希望构建个性化工作流的技术爱好者、开发者,以及注重隐私保护且不愿被单一生态绑定的普通用户。只要具备基础的终端操作能力(支持 macOS、Linux 及 Windows WSL2),即可通过简单的命令行引导完成部署。如果你渴望拥有一个懂你
stable-diffusion-webui
stable-diffusion-webui 是一个基于 Gradio 构建的网页版操作界面,旨在让用户能够轻松地在本地运行和使用强大的 Stable Diffusion 图像生成模型。它解决了原始模型依赖命令行、操作门槛高且功能分散的痛点,将复杂的 AI 绘图流程整合进一个直观易用的图形化平台。 无论是希望快速上手的普通创作者、需要精细控制画面细节的设计师,还是想要深入探索模型潜力的开发者与研究人员,都能从中获益。其核心亮点在于极高的功能丰富度:不仅支持文生图、图生图、局部重绘(Inpainting)和外绘(Outpainting)等基础模式,还独创了注意力机制调整、提示词矩阵、负向提示词以及“高清修复”等高级功能。此外,它内置了 GFPGAN 和 CodeFormer 等人脸修复工具,支持多种神经网络放大算法,并允许用户通过插件系统无限扩展能力。即使是显存有限的设备,stable-diffusion-webui 也提供了相应的优化选项,让高质量的 AI 艺术创作变得触手可及。
everything-claude-code
everything-claude-code 是一套专为 AI 编程助手(如 Claude Code、Codex、Cursor 等)打造的高性能优化系统。它不仅仅是一组配置文件,而是一个经过长期实战打磨的完整框架,旨在解决 AI 代理在实际开发中面临的效率低下、记忆丢失、安全隐患及缺乏持续学习能力等核心痛点。 通过引入技能模块化、直觉增强、记忆持久化机制以及内置的安全扫描功能,everything-claude-code 能显著提升 AI 在复杂任务中的表现,帮助开发者构建更稳定、更智能的生产级 AI 代理。其独特的“研究优先”开发理念和针对 Token 消耗的优化策略,使得模型响应更快、成本更低,同时有效防御潜在的攻击向量。 这套工具特别适合软件开发者、AI 研究人员以及希望深度定制 AI 工作流的技术团队使用。无论您是在构建大型代码库,还是需要 AI 协助进行安全审计与自动化测试,everything-claude-code 都能提供强大的底层支持。作为一个曾荣获 Anthropic 黑客大奖的开源项目,它融合了多语言支持与丰富的实战钩子(hooks),让 AI 真正成长为懂上
ComfyUI
ComfyUI 是一款功能强大且高度模块化的视觉 AI 引擎,专为设计和执行复杂的 Stable Diffusion 图像生成流程而打造。它摒弃了传统的代码编写模式,采用直观的节点式流程图界面,让用户通过连接不同的功能模块即可构建个性化的生成管线。 这一设计巧妙解决了高级 AI 绘图工作流配置复杂、灵活性不足的痛点。用户无需具备编程背景,也能自由组合模型、调整参数并实时预览效果,轻松实现从基础文生图到多步骤高清修复等各类复杂任务。ComfyUI 拥有极佳的兼容性,不仅支持 Windows、macOS 和 Linux 全平台,还广泛适配 NVIDIA、AMD、Intel 及苹果 Silicon 等多种硬件架构,并率先支持 SDXL、Flux、SD3 等前沿模型。 无论是希望深入探索算法潜力的研究人员和开发者,还是追求极致创作自由度的设计师与资深 AI 绘画爱好者,ComfyUI 都能提供强大的支持。其独特的模块化架构允许社区不断扩展新功能,使其成为当前最灵活、生态最丰富的开源扩散模型工具之一,帮助用户将创意高效转化为现实。
markitdown
MarkItDown 是一款由微软 AutoGen 团队打造的轻量级 Python 工具,专为将各类文件高效转换为 Markdown 格式而设计。它支持 PDF、Word、Excel、PPT、图片(含 OCR)、音频(含语音转录)、HTML 乃至 YouTube 链接等多种格式的解析,能够精准提取文档中的标题、列表、表格和链接等关键结构信息。 在人工智能应用日益普及的今天,大语言模型(LLM)虽擅长处理文本,却难以直接读取复杂的二进制办公文档。MarkItDown 恰好解决了这一痛点,它将非结构化或半结构化的文件转化为模型“原生理解”且 Token 效率极高的 Markdown 格式,成为连接本地文件与 AI 分析 pipeline 的理想桥梁。此外,它还提供了 MCP(模型上下文协议)服务器,可无缝集成到 Claude Desktop 等 LLM 应用中。 这款工具特别适合开发者、数据科学家及 AI 研究人员使用,尤其是那些需要构建文档检索增强生成(RAG)系统、进行批量文本分析或希望让 AI 助手直接“阅读”本地文件的用户。虽然生成的内容也具备一定可读性,但其核心优势在于为机器
LLMs-from-scratch
LLMs-from-scratch 是一个基于 PyTorch 的开源教育项目,旨在引导用户从零开始一步步构建一个类似 ChatGPT 的大型语言模型(LLM)。它不仅是同名技术著作的官方代码库,更提供了一套完整的实践方案,涵盖模型开发、预训练及微调的全过程。 该项目主要解决了大模型领域“黑盒化”的学习痛点。许多开发者虽能调用现成模型,却难以深入理解其内部架构与训练机制。通过亲手编写每一行核心代码,用户能够透彻掌握 Transformer 架构、注意力机制等关键原理,从而真正理解大模型是如何“思考”的。此外,项目还包含了加载大型预训练权重进行微调的代码,帮助用户将理论知识延伸至实际应用。 LLMs-from-scratch 特别适合希望深入底层原理的 AI 开发者、研究人员以及计算机专业的学生。对于不满足于仅使用 API,而是渴望探究模型构建细节的技术人员而言,这是极佳的学习资源。其独特的技术亮点在于“循序渐进”的教学设计:将复杂的系统工程拆解为清晰的步骤,配合详细的图表与示例,让构建一个虽小但功能完备的大模型变得触手可及。无论你是想夯实理论基础,还是为未来研发更大规模的模型做准备