PointPillars
PointPillars 是一个基于 PyTorch 实现的开源项目,专注于利用 3D 激光雷达(LiDAR)点云数据进行快速物体检测,特别针对 KITTI 数据集进行了优化。它核心解决了自动驾驶感知中如何高效、准确地将稀疏且无序的点云数据转化为可识别的三维目标(如车辆、行人和骑行者)这一难题。
与依赖复杂框架的实现不同,PointPillars 的最大亮点在于其“轻量化”与“易用性”。用户无需安装 Spconv、MMDetection 或 MMDetection3D 等重型依赖库即可直接运行,代码结构单一清晰,非常适合希望深入理解点云检测算法原理的学习者。此外,该项目不仅支持将模型导出为 ONNX 和 TensorRT 格式以加速部署,还展示了在 KITTI 验证集上优于部分官方版本的检测精度。
这款工具非常适合人工智能研究人员、自动驾驶算法开发者以及高校学生使用。对于想要从零开始复现经典论文、进行算法对比研究,或者需要将检测模型快速落地到嵌入式设备的工程师来说,PointPillars 提供了一个简洁高效的起点。无论是用于学术探索还是原型开发,它都能帮助用户以更低的门槛掌握前沿的 3D 感知技术。
使用场景
某自动驾驶初创团队正在开发一款面向城市低速场景的无人配送车,急需在嵌入式计算平台上实现实时的 3D 障碍物检测功能。
没有 PointPillars 时
- 部署门槛极高:团队必须安装 Spconv、MMDetection3D 等重型依赖库,环境配置复杂且极易出现版本冲突,导致开发进度停滞。
- 推理速度不达标:现有的复杂 3D 检测模型在车载芯片上运行缓慢,无法满足配送车在动态人流中每秒 10 帧以上的实时安全要求。
- 代码调试困难:开源方案往往封装过深或逻辑分散,工程师难以快速定位点云特征提取中的问题,定制化修改耗时费力。
- 端侧落地受阻:缺乏便捷的模型导出工具,无法将训练好的 PyTorch 模型高效转换为 TensorRT 引擎以适配边缘设备。
使用 PointPillars 后
- 轻量化快速集成:无需安装 Spconv 等大型框架,仅凭轻量级 PyTorch 实现即可完成环境搭建,团队两天内便跑通了 KITTI 数据集验证。
- 实时性能显著提升:利用其独特的“支柱”编码结构,模型在保持高精度(3D-BBox mAP 超 73%)的同时,推理速度大幅提升,完美满足实时避障需求。
- 源码清晰易改:单一网络结构的代码逻辑直观透明,算法工程师能迅速理解数据流,针对配送车特有的低矮障碍物进行了针对性优化。
- 无缝端侧部署:借助支持的 ONNX 与 TensorRT 导出功能,模型顺利部署至车载计算单元,延迟降低至毫秒级,确保了行驶安全。
PointPillars 以其极简的架构设计和高效的推理性能,成功帮助团队跨越了从算法验证到嵌入式实车部署的关键鸿沟。
运行环境要求
- 未说明
需要 NVIDIA GPU (隐含,因涉及 CUDA/TensorRT/Spconv 等 3D 检测常用组件),具体型号和显存未说明
未说明
快速开始
PointPillars:用于点云目标检测的快速编码器
一个简单的基于PyTorch的PointPillars实现,用于3D激光雷达(KITTI)目标检测。[知乎]
- 无需安装Spconv、mmdet或mmdet3d即可运行。
- 此仓库仅实现了单一的检测网络(PointPillars),因此代码更加易于阅读。
- 衷心感谢优秀的开源架构mmcv、mmdet和mmdet3d,它们帮助我学习3D目标检测并完成了本仓库的实现。
新闻
2025-02 支持将PointPillars代码打包成Python包。
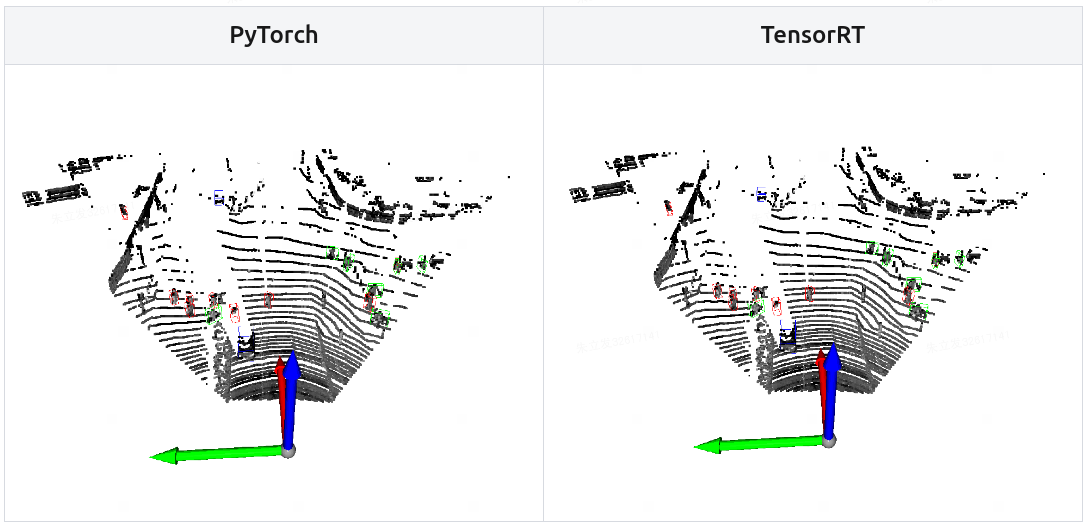
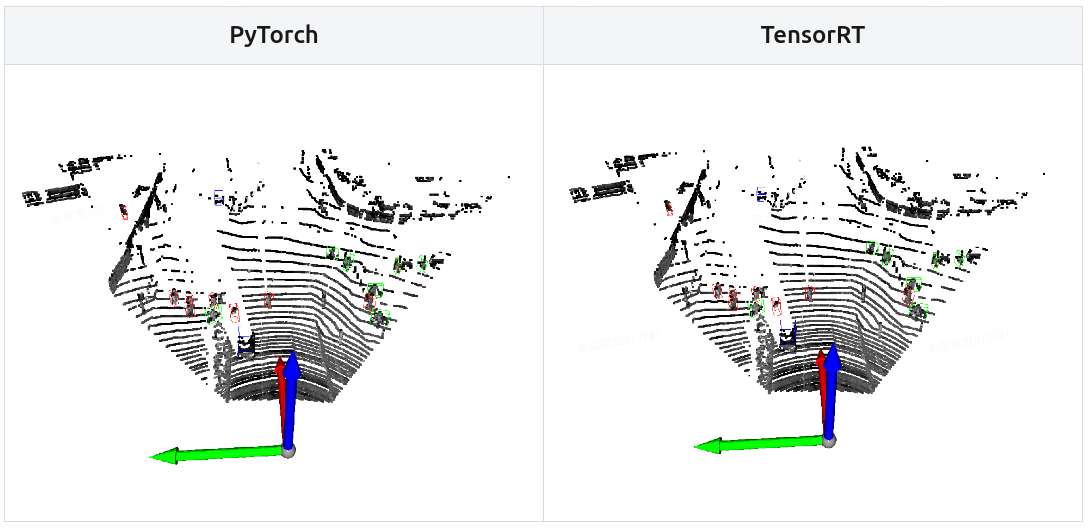
2024-04 在分支feature/deployment上支持将PointPillars导出为ONNX和TensorRT格式。
KITTI验证集上的mAP(Easy, Moderate, Hard)
| 仓库 | 指标 | 总体 | 行人 | 自行车 | 汽车 |
|---|---|---|---|---|---|
| 本仓库 | 3D-BBox | 73.3259 62.7834 59.6278 | 51.4642 47.9446 43.8040 | 81.8677 63.6617 60.9126 | 86.6456 76.7439 74.1668 |
| mmdet3d v0.18.1 | 3D-BBox | 72.0537, 60.1114, 55.8320 | 52.0263, 46.4037, 42.4841 | 78.7231, 59.9526, 57.2489 | 85.4118, 73.9780, 67.7630 |
| 本仓库 | BEV | 77.8540 69.8003 66.6699 | 59.1687 54.3456 50.5023 | 84.4268 67.1409 63.7409 | 89.9664 87.9145 85.7664 |
| mmdet3d v0.18.1 | BEV | 76.6485, 67.7609, 64.5605 | 59.0778, 53.3638, 48.4230 | 80.9328, 63.3447, 60.0618 | 89.9348, 86.5743, 85.1967 |
| 本仓库 | 2D-BBox | 80.5097 74.6120 71.4758 | 64.6249 61.4201 57.5965 | 86.2569 73.0828 70.1726 | 90.6471 89.3330 86.6583 |
| mmdet3d v0.18.1 | 2D-BBox | 78.4938, 73.4781, 70.3613 | 62.2413, 58.9157, 55.3660 | 82.6460, 72.3547, 68.4669 | 90.5939, 89.1638, 87.2511 |
| 本仓库 | AOS | 74.9647 68.1712 65.2817 | 49.3777 46.7284 43.8352 | 85.0412 69.1024 66.2801 | 90.4752 88.6828 85.7298 |
| mmdet3d v0.18.1 | AOS | 72.41, 66.23, 63.55 | 46.00, 43.22, 40.94 | 80.85, 67.20, 63.63 | 90.37, 88.27, 86.07 |
- 注:此处报告的是mmdet3d v0.18.1(2022年2月9日至2022年3月1日)基于官方提供的checkpoint的性能。在mmdet3d v1.0.0rc1中进行了大量改进。
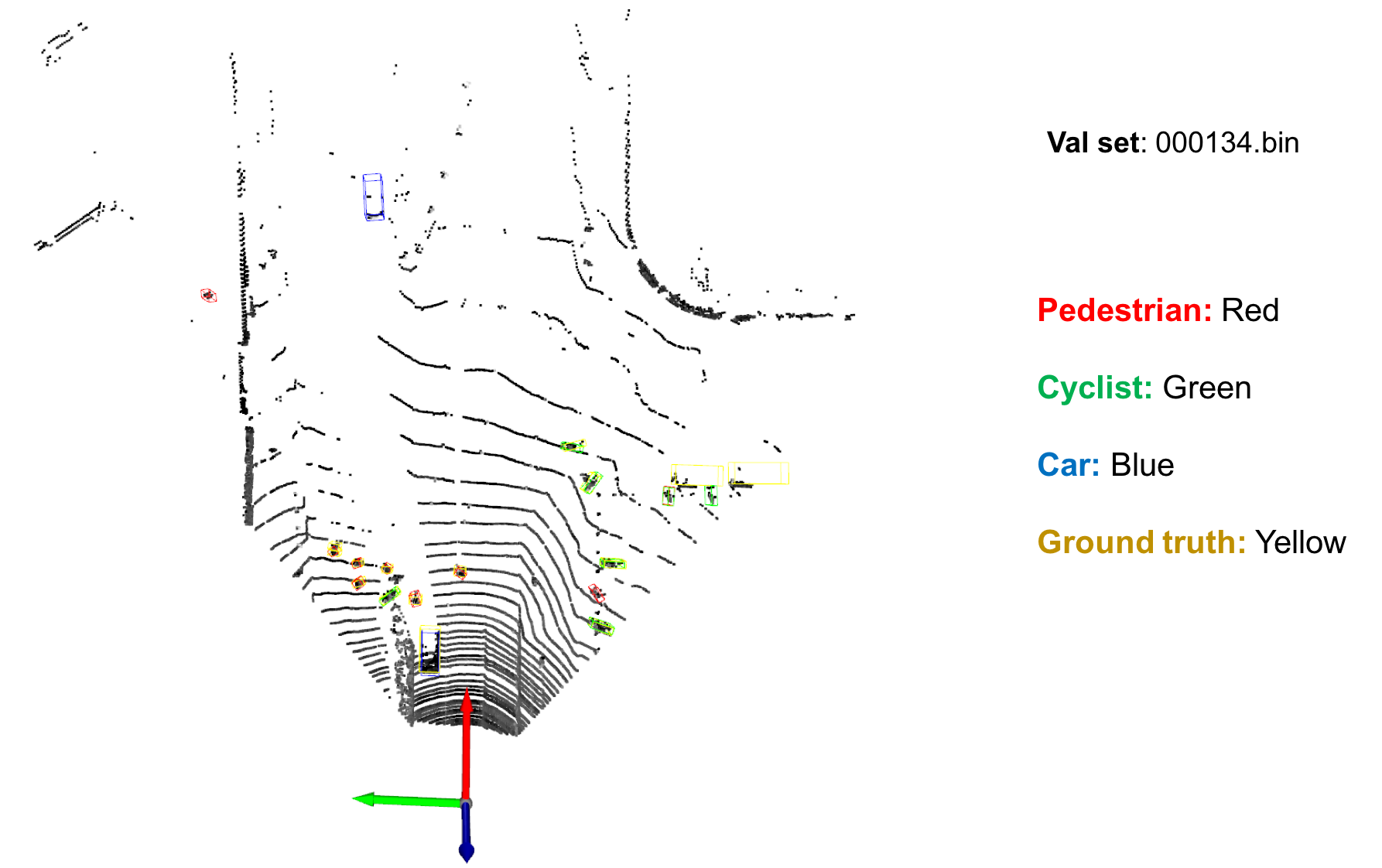
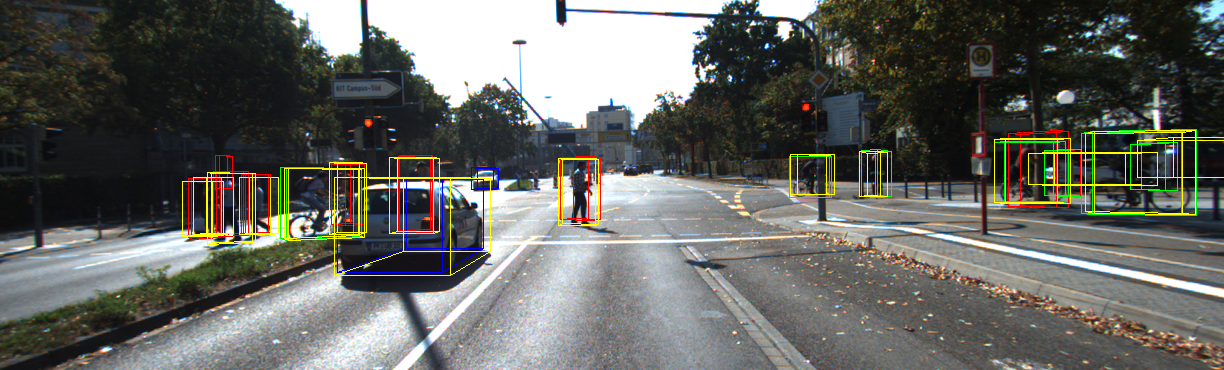
检测可视化
[安装]
按以下步骤安装PointPillars及其所有依赖项:
cd PointPillars/
pip install -r requirements.txt
python setup.py build_ext --inplace
pip install .
[数据集]
下载
下载点云(29GB)、图像(12 GB)、标定文件(16 MB)和标注(5 MB)。按照如下格式整理数据集:
kitti |- training |- calib (#7481 .txt) |- image_2 (#7481 .png) |- label_2 (#7481 .txt) |- velodyne (#7481 .bin) |- testing |- calib (#7518 .txt) |- image_2 (#7518 .png) |- velodyne (#7518 .bin)首先预处理KITTI数据集
cd PointPillars/ python pre_process_kitti.py --data_root your_path_to_kitti现在,我们得到如下数据集:
kitti |- training |- calib (#7481 .txt) |- image_2 (#7481 .png) |- label_2 (#7481 .txt) |- velodyne (#7481 .bin) |- velodyne_reduced (#7481 .bin) |- testing |- calib (#7518 .txt) |- image_2 (#7518 .png) |- velodyne (#7518 .bin) |- velodyne_reduced (#7518 .bin) |- kitti_gt_database (# 19700 .bin) |- kitti_infos_train.pkl |- kitti_infos_val.pkl |- kitti_infos_trainval.pkl |- kitti_infos_test.pkl |- kitti_dbinfos_train.pkl
[训练]
cd PointPillars/
python train.py --data_root your_path_to_kitti
[评估]
cd PointPillars/
python evaluate.py --ckpt pretrained/epoch_160.pth --data_root your_path_to_kitti
[测试]
cd PointPillars/
# 1. 推理并可视化点云检测结果
python test.py --ckpt pretrained/epoch_160.pth --pc_path your_pc_path
# 2. 推理并可视化点云检测结果及真实标签
python test.py --ckpt pretrained/epoch_160.pth --pc_path your_pc_path --calib_path your_calib_path --gt_path your_gt_path
# 3. 推理并可视化点云与图像联合检测结果
python test.py --ckpt pretrained/epoch_160.pth --pc_path your_pc_path --calib_path your_calib_path --img_path your_img_path
例如:
a. [在验证集000134上进行推理]
python test.py --ckpt pretrained/epoch_160.pth --pc_path pointpillars/dataset/demo_data/val/000134.bin
或者
python test.py --ckpt pretrained/epoch_160.pth --pc_path pointpillars/dataset/demo_data/val/000134.bin \
--calib_path pointpillars/dataset/demo_data/val/000134.txt \
--img_path pointpillars/dataset/demo_data/val/000134.png \
--gt_path pointpillars/dataset/demo_data/val/000134_gt.txt
b. [在测试集000002上进行推理]
python test.py --ckpt pretrained/epoch_160.pth --pc_path pointpillars/dataset/demo_data/test/000002.bin
或者
python test.py --ckpt pretrained/epoch_160.pth --pc_path pointpillars/dataset/demo_data/test/000002.bin \
--calib_path pointpillars/dataset/demo_data/test/000002.txt \
--img_path pointpillars/dataset/demo_data/test/000002.png
致谢
版本历史
v1.0.02025/02/14常见问题
相似工具推荐
ML-For-Beginners
ML-For-Beginners 是由微软推出的一套系统化机器学习入门课程,旨在帮助零基础用户轻松掌握经典机器学习知识。这套课程将学习路径规划为 12 周,包含 26 节精炼课程和 52 道配套测验,内容涵盖从基础概念到实际应用的完整流程,有效解决了初学者面对庞大知识体系时无从下手、缺乏结构化指导的痛点。 无论是希望转型的开发者、需要补充算法背景的研究人员,还是对人工智能充满好奇的普通爱好者,都能从中受益。课程不仅提供了清晰的理论讲解,还强调动手实践,让用户在循序渐进中建立扎实的技能基础。其独特的亮点在于强大的多语言支持,通过自动化机制提供了包括简体中文在内的 50 多种语言版本,极大地降低了全球不同背景用户的学习门槛。此外,项目采用开源协作模式,社区活跃且内容持续更新,确保学习者能获取前沿且准确的技术资讯。如果你正寻找一条清晰、友好且专业的机器学习入门之路,ML-For-Beginners 将是理想的起点。
funNLP
funNLP 是一个专为中文自然语言处理(NLP)打造的超级资源库,被誉为"NLP 民工的乐园”。它并非单一的软件工具,而是一个汇集了海量开源项目、数据集、预训练模型和实用代码的综合性平台。 面对中文 NLP 领域资源分散、入门门槛高以及特定场景数据匮乏的痛点,funNLP 提供了“一站式”解决方案。这里不仅涵盖了分词、命名实体识别、情感分析、文本摘要等基础任务的标准工具,还独特地收录了丰富的垂直领域资源,如法律、医疗、金融行业的专用词库与数据集,甚至包含古诗词生成、歌词创作等趣味应用。其核心亮点在于极高的全面性与实用性,从基础的字典词典到前沿的 BERT、GPT-2 模型代码,再到高质量的标注数据和竞赛方案,应有尽有。 无论是刚刚踏入 NLP 领域的学生、需要快速验证想法的算法工程师,还是从事人工智能研究的学者,都能在这里找到急需的“武器弹药”。对于开发者而言,它能大幅减少寻找数据和复现模型的时间;对于研究者,它提供了丰富的基准测试资源和前沿技术参考。funNLP 以开放共享的精神,极大地降低了中文自然语言处理的开发与研究成本,是中文 AI 社区不可或缺的宝藏仓库。
cs-video-courses
cs-video-courses 是一个精心整理的计算机科学视频课程清单,旨在为自学者提供系统化的学习路径。它汇集了全球知名高校(如加州大学伯克利分校、新南威尔士大学等)的完整课程录像,涵盖从编程基础、数据结构与算法,到操作系统、分布式系统、数据库等核心领域,并深入延伸至人工智能、机器学习、量子计算及区块链等前沿方向。 面对网络上零散且质量参差不齐的教学资源,cs-video-courses 解决了学习者难以找到成体系、高难度大学级别课程的痛点。该项目严格筛选内容,仅收录真正的大学层级课程,排除了碎片化的简短教程或商业广告,确保用户能接触到严谨的学术内容。 这份清单特别适合希望夯实计算机基础的开发者、需要补充特定领域知识的研究人员,以及渴望像在校生一样系统学习计算机科学的自学者。其独特的技术亮点在于分类极其详尽,不仅包含传统的软件工程与网络安全,还细分了生成式 AI、大语言模型、计算生物学等新兴学科,并直接链接至官方视频播放列表,让用户能一站式获取高质量的教育资源,免费享受世界顶尖大学的课堂体验。
ragflow
RAGFlow 是一款领先的开源检索增强生成(RAG)引擎,旨在为大语言模型构建更精准、可靠的上下文层。它巧妙地将前沿的 RAG 技术与智能体(Agent)能力相结合,不仅支持从各类文档中高效提取知识,还能让模型基于这些知识进行逻辑推理和任务执行。 在大模型应用中,幻觉问题和知识滞后是常见痛点。RAGFlow 通过深度解析复杂文档结构(如表格、图表及混合排版),显著提升了信息检索的准确度,从而有效减少模型“胡编乱造”的现象,确保回答既有据可依又具备时效性。其内置的智能体机制更进一步,使系统不仅能回答问题,还能自主规划步骤解决复杂问题。 这款工具特别适合开发者、企业技术团队以及 AI 研究人员使用。无论是希望快速搭建私有知识库问答系统,还是致力于探索大模型在垂直领域落地的创新者,都能从中受益。RAGFlow 提供了可视化的工作流编排界面和灵活的 API 接口,既降低了非算法背景用户的上手门槛,也满足了专业开发者对系统深度定制的需求。作为基于 Apache 2.0 协议开源的项目,它正成为连接通用大模型与行业专有知识之间的重要桥梁。
PaddleOCR
PaddleOCR 是一款基于百度飞桨框架开发的高性能开源光学字符识别工具包。它的核心能力是将图片、PDF 等文档中的文字提取出来,转换成计算机可读取的结构化数据,让机器真正“看懂”图文内容。 面对海量纸质或电子文档,PaddleOCR 解决了人工录入效率低、数字化成本高的问题。尤其在人工智能领域,它扮演着连接图像与大型语言模型(LLM)的桥梁角色,能将视觉信息直接转化为文本输入,助力智能问答、文档分析等应用场景落地。 PaddleOCR 适合开发者、算法研究人员以及有文档自动化需求的普通用户。其技术优势十分明显:不仅支持全球 100 多种语言的识别,还能在 Windows、Linux、macOS 等多个系统上运行,并灵活适配 CPU、GPU、NPU 等各类硬件。作为一个轻量级且社区活跃的开源项目,PaddleOCR 既能满足快速集成的需求,也能支撑前沿的视觉语言研究,是处理文字识别任务的理想选择。
awesome-machine-learning
awesome-machine-learning 是一份精心整理的机器学习资源清单,汇集了全球优秀的机器学习框架、库和软件工具。面对机器学习领域技术迭代快、资源分散且难以甄选的痛点,这份清单按编程语言(如 Python、C++、Go 等)和应用场景(如计算机视觉、自然语言处理、深度学习等)进行了系统化分类,帮助使用者快速定位高质量项目。 它特别适合开发者、数据科学家及研究人员使用。无论是初学者寻找入门库,还是资深工程师对比不同语言的技术选型,都能从中获得极具价值的参考。此外,清单还延伸提供了免费书籍、在线课程、行业会议、技术博客及线下聚会等丰富资源,构建了从学习到实践的全链路支持体系。 其独特亮点在于严格的维护标准:明确标记已停止维护或长期未更新的项目,确保推荐内容的时效性与可靠性。作为机器学习领域的“导航图”,awesome-machine-learning 以开源协作的方式持续更新,旨在降低技术探索门槛,让每一位从业者都能高效地站在巨人的肩膀上创新。