DynamicViT
DynamicViT 是一款专为提升视觉模型效率而设计的开源框架,核心功能是通过“动态令牌稀疏化”技术,智能地剪除 Vision Transformer 中冗余的图像块(Token)。它主要解决了传统视觉模型在推理过程中计算量大、速度慢的痛点,能够在几乎不损失精度(下降小于 0.5%)的前提下,显著降低超过 30% 的计算量(FLOPs),并将处理吞吐量提升 40% 以上。
该工具特别适合从事计算机视觉研究的学者、需要部署高效模型的算法工程师以及关注推理成本的开发者使用。其独特的技术亮点在于“动态”与“渐进式”机制:不同于静态剪枝,DynamicViT 能根据每张输入图片的具体内容,实时判断并逐步剔除不重要的信息区域,从而实现真正的按需计算。此外,该项目已扩展支持 ConvNeXt、Swin Transformer 等多种主流架构,并涵盖目标检测与语义分割等任务,提供了丰富的预训练模型供社区直接调用或二次开发,是平衡模型性能与推理速度的优秀选择。
使用场景
某自动驾驶初创团队正在开发车载实时路况分析系统,需要在算力有限的边缘设备上运行高精度的视觉 Transformer 模型以识别行人和障碍物。
没有 DynamicViT 时
- 推理延迟过高:标准的 DeiT 或 Swin Transformer 模型计算量巨大,导致单帧图像处理时间超过 50ms,无法满足车辆高速行驶时的实时响应需求。
- 硬件资源浪费:模型对所有图像区域(包括天空、路面等无信息背景)进行同等密度的计算,大量浮点运算(FLOPs)被消耗在冗余的 Token 上。
- 部署成本高昂:为了维持必要的帧率,团队被迫升级更昂贵的车载 GPU 芯片,显著增加了整车的 BOM(物料清单)成本。
- 能耗与发热严重:持续的高负荷运算导致设备功耗激增,引发散热问题,影响系统在封闭车机环境下的稳定性。
使用 DynamicViT 后
- 吞吐量大幅提升:DynamicViT 根据输入图像内容动态剪枝冗余 Token,将系统吞吐量提升了 40% 以上,成功实现了低延迟的实时检测。
- 计算效率优化:通过渐进式稀疏化策略,模型自动跳过背景区域的计算,减少了超过 30% 的 FLOPs,让每一分算力都用在关键目标上。
- 低成本硬件适配:在精度损失控制在 0.5% 以内的前提下,原有中端芯片即可流畅运行大模型,直接降低了硬件采购成本。
- 能效比显著改善:计算负载的动态调整降低了整体功耗和设备发热量,延长了车载系统的持续工作时间并提升了稳定性。
DynamicViT 通过“按需计算”的智能机制,在几乎不牺牲精度的情况下,成功解决了视觉 Transformer 在边缘端落地难、成本高、速度慢的核心痛点。
运行环境要求
- Linux
- 必需 NVIDIA GPU
- 训练部分模型(如 ConvNeXt, Swin)推荐使用多卡环境(示例命令使用 8 张 GPU 或 4 个 8 卡节点)
- 具体显存大小未说明,但需足以支撑 ImageNet 训练批次(batch_size 128)
- CUDA 版本未明确说明,需匹配安装的 PyTorch 版本
未说明

快速开始
基于动态空间稀疏化的高效视觉Transformer和CNN
本仓库包含DynamicViT(NeurIPS 2021)的PyTorch实现。
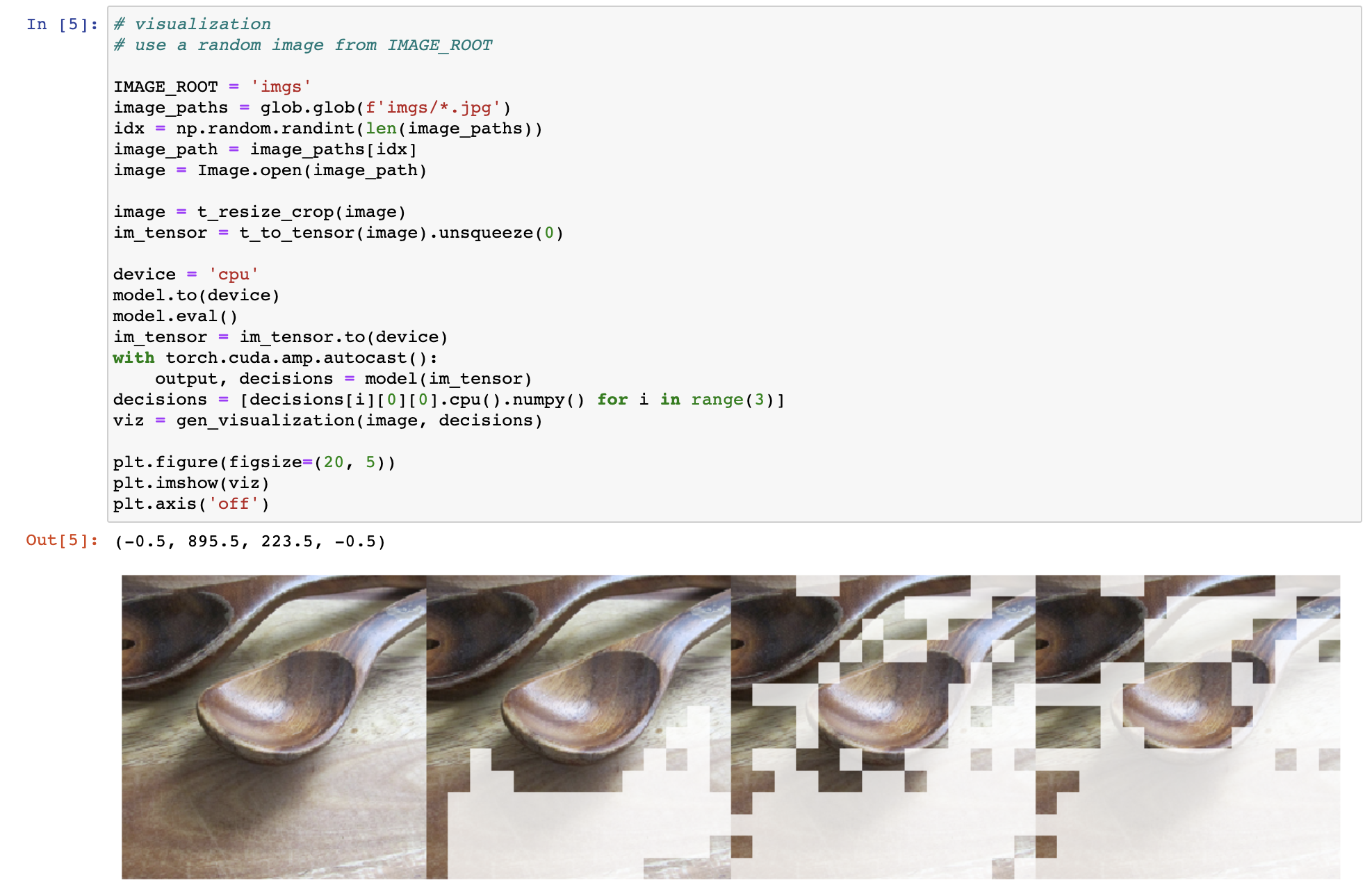
DynamicViT 是一种动态标记稀疏化框架,能够根据输入逐步且动态地剪枝视觉Transformer中的冗余标记。我们的方法可将FLOPs降低超过 30%,并将吞吐量提升超过 40%,同时各类视觉Transformer的精度下降幅度不超过 0.5%。
🔥更新
我们已将该方法扩展至更多 网络架构(如ConvNeXt和Swin Transformer)以及更多 任务(如目标检测和语义分割),并引入了改进的 动态空间稀疏化 框架。详情请参阅论文的扩展版本,该版本已被T-PAMI接收。
图像示例
视频示例
模型库
我们提供了在ImageNet上预训练的DynamicViT模型:
| 名称 | 模型 | rho | 精度@1 | 精度@5 | FLOPs | 下载链接 |
|---|---|---|---|---|---|---|
| DynamicViT-DeiT-256/0.7 | deit-256 |
0.7 | 76.53 | 93.12 | 1.3G | Google Drive / 清华大学云 |
| DynamicViT-DeiT-S/0.7 | deit-s |
0.7 | 79.32 | 94.68 | 2.9G | Google Drive / 清华大学云 |
| DynamicViT-DeiT-B/0.7 | deit-b |
0.7 | 81.43 | 95.46 | 11.4G | Google Drive / 清华大学云 |
| DynamicViT-LVViT-S/0.5 | lvvit-s |
0.5 | 81.97 | 95.76 | 3.7G | Google Drive / 清华大学云 |
| DynamicViT-LVViT-S/0.7 | lvvit-s |
0.7 | 83.08 | 96.25 | 4.6G | Google Drive / 清华大学云 |
| DynamicViT-LVViT-M/0.7 | lvvit-m |
0.7 | 83.82 | 96.58 | 8.5G | Google Drive / 清华大学云 |
🔥更新: 我们还提供了在ImageNet上预训练的DynamicCNN和DynamicSwin模型:
| 名称 | 模型 | rho | 精度@1 | 精度@5 | FLOPs | 下载链接 |
|---|---|---|---|---|---|---|
| DynamicCNN-T/0.7 | convnext-t |
0.7 | 81.59 | 95.72 | 3.6G | Google Drive / 清华大学云 |
| DynamicCNN-T/0.9 | convnext-t |
0.9 | 82.06 | 95.89 | 3.9G | Google Drive / 清华大学云 |
| DynamicCNN-S/0.7 | convnext-s |
0.7 | 82.57 | 96.29 | 5.8G | Google Drive / 清华大学云 |
| DynamicCNN-S/0.9 | convnext-s |
0.9 | 83.12 | 96.42 | 6.8G | Google Drive / 清华大学云 |
| DynamicCNN-B/0.7 | convnext-b |
0.7 | 83.45 | 96.56 | 10.2G | Google Drive / 清华大学云 |
| DynamicCNN-B/0.9 | convnext-b |
0.9 | 83.96 | 96.76 | 11.9G | Google Drive / 清华大学云 |
| DynamicSwin-T/0.7 | swin-t |
0.7 | 80.91 | 95.42 | 4.0G | Google Drive / 清华大学云 |
| DynamicSwin-S/0.7 | swin-s |
0.7 | 83.21 | 96.33 | 6.9G | Google Drive / 清华大学云 |
| DynamicSwin-B/0.7 | swin-b |
0.7 | 83.43 | 96.45 | 12.1G | Google Drive / 清华大学云 |
使用方法
需求
- torch>=1.8.0
- torchvision>=0.9.0
- timm==0.3.2
- tensorboardX
- six
- fvcore
数据准备: 从 http://image-net.org/ 下载并解压 ImageNet 图像。目录结构应如下所示:
│ILSVRC2012/
├──train/
│ ├── n01440764
│ │ ├── n01440764_10026.JPEG
│ │ ├── n01440764_10027.JPEG
│ │ ├── ......
│ ├── ......
├──val/
│ ├── n01440764
│ │ ├── ILSVRC2012_val_00000293.JPEG
│ │ ├── ILSVRC2012_val_00002138.JPEG
│ │ ├── ......
│ ├── ......
模型准备: 如有需要,请下载预训练模型:
| 模型 | 链接 | 模型 | 链接 |
|---|---|---|---|
| DeiT-Small | 链接 | LVViT-S | 链接 |
| DeiT-Base | 链接 | LVViT-M | 链接 |
| ConvNeXt-T | 链接 | Swin-T | 链接 |
| ConvNeXt-S | 链接 | Swin-S | 链接 |
| ConvNeXt-B | 链接 | Swin-B | 链接 |
演示
您可以在 Colab 上试用 DynamicViT ![]() 。感谢 @dirtycomputer 的贡献。
。感谢 @dirtycomputer 的贡献。
我们还提供了一个 Jupyter 笔记本,您可以在其中运行 DynamicViT 的可视化效果。
要运行演示,您需要安装 matplotlib。
评估
要在单个 GPU 上使用 ImageNet 验证集评估预训练的 DynamicViT 模型,请运行以下命令:
python infer.py --data_path /path/to/ILSVRC2012/ --model model_name \
--model_path /path/to/model --base_rate 0.7
训练
要在 ImageNet 上训练动态空间稀疏化模型,请运行以下命令:
(您可以通过调整 base_rate 来训练不同保留率的模型。)
DeiT-S
python -m torch.distributed.launch --nproc_per_node=8 --use_env main.py --output_dir logs/dynamicvit_deit-s --model deit-s --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 30 --base_rate 0.7 --lr 1e-3 --warmup_epochs 5
DeiT-B
python -m torch.distributed.launch --nproc_per_node=8 --use_env main.py --output_dir logs/dynamicvit_deit-b --model deit-b --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 30 --base_rate 0.7 --lr 1e-3 --warmup_epochs 5 --drop_path 0.2 --ratio_weight 5.0
LV-ViT-S
python -m torch.distributed.launch --nproc_per_node=8 --use_env main.py --output_dir logs/dynamicvit_lvvit-s --model lvvit-s --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 30 --base_rate 0.7 --lr 1e-3 --warmup_epochs 5
LV-ViT-M
python -m torch.distributed.launch --nproc_per_node=8 --use_env main.py --output_dir logs/dynamicvit_lvvit-m --model lvvit-m --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 30 --base_rate 0.7 --lr 1e-3 --warmup_epochs 5
DynamicViT 仅需训练 15 个 epoch 也能达到相近的性能(相比 30 个 epoch 的准确率低约 0.1%)。
ConvNeXt-T
在 8 张 GPU 上训练:
python -m torch.distributed.launch --nproc_per_node=8 --use_env main.py --output_dir logs/dynamic_conv-t --model convnext-t --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 120 --base_rate 0.7 --lr 4e-3 --drop_path 0.2 --update_freq 4 --lr_scale 0.2
在 4 个 8-GPU 节点上训练:
python run_with_submitit.py --nodes 4 --ngpus 8 --output_dir logs/dynamic_conv-t --model convnext-t --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 120 --base_rate 0.7 --lr 4e-3 --drop_path 0.2 --update_freq 1 --lr_scale 0.2
ConvNeXt-S
在 8 张 GPU 上训练:
python -m torch.distributed.launch --nproc_per_node=8 --use_env main.py --output_dir logs/dynamic_conv-s --model convnext-s --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 120 --base_rate 0.7 --lr 4e-3 --drop_path 0.2 --update_freq 4 --lr_scale 0.2
在 4 个 8-GPU 节点上训练:
python run_with_submitit.py --nodes 4 --ngpus 8 --output_dir logs/dynamic_conv-s --model convnext-s --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 120 --base_rate 0.7 --lr 4e-3 --drop_path 0.2 --update_freq 1 --lr_scale 0.2
ConvNeXt-B
在 8 张 GPU 上训练:
python -m torch.distributed.launch --nproc_per_node=8 --use_env main.py --output_dir logs/dynamic_conv-b --model convnext-b --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 120 --base_rate 0.7 --lr 4e-3 --drop_path 0.5 --update_freq 4 --lr_scale 0.2
在 4 个 8-GPU 节点上训练:
python run_with_submitit.py --nodes 4 --ngpus 8 --output_dir logs/dynamic_conv-b --model convnext-b --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 120 --base_rate 0.7 --lr 4e-3 --drop_path 0.5 --update_freq 1 --lr_scale 0.2
Swin-T
在 8 张 GPU 上训练:
python -m torch.distributed.launch --nproc_per_node=8 --use_env main.py --output_dir logs/dynamic_swin-t --model swin-t --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 120 --base_rate 0.7 --lr 4e-3 --drop_path 0.2 --update_freq 4 --lr_scale 0.2
在 4 个 8-GPU 节点上训练:
python run_with_submitit.py --nodes 4 --ngpus 8 --output_dir logs/dynamic_swin-t --model swin-t --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 120 --base_rate 0.7 --lr 4e-3 --drop_path 0.2 --update_freq 1 --lr_scale 0.2
Swin-S
在 8 张 GPU 上训练:
python -m torch.distributed.launch --nproc_per_node=8 --use_env main.py --output_dir logs/dynamic_swin-s --model swin-s --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 120 --base_rate 0.7 --lr 4e-3 --drop_path 0.2 --update_freq 4 --lr_scale 0.2
在 4 个 8-GPU 节点上训练:
python run_with_submitit.py --nodes 4 --ngpus 8 --output_dir logs/dynamic_swin-s --model swin-s --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 120 --base_rate 0.7 --lr 4e-3 --drop_path 0.2 --update_freq 1 --lr_scale 0.2
Swin-B
在 8 张 GPU 上训练:
python -m torch.distributed.launch --nproc_per_node=8 --use_env main.py --output_dir logs/dynamic_swin-b --model swin-b --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 120 --base_rate 0.7 --lr 4e-3 --drop_path 0.5 --update_freq 4 --lr_scale 0.2
在 4 个 8-GPU 节点上训练:
python run_with_submitit.py --nodes 4 --ngpus 8 --output_dir logs/dynamic_swin-b --model swin-b --input_size 224 --batch_size 128 --data_path /path/to/ILSVRC2012/ --epochs 120 --base rate 0.7 --lr 4e-3 --drop_path 0.5 --update freq 1 --lr scale 0.2
许可证
MIT 许可证
致谢
我们的代码基于 pytorch-image-models、DeiT、LV-ViT、ConvNeXt 和 Swin-Transformer。
引用
如果您在研究中使用了我们的工作,请考虑引用以下文献:
@inproceedings{rao2021dynamicvit,
title={DynamicViT: Efficient Vision Transformers with Dynamic Token Sparsification},
author={Rao, Yongming and Zhao, Wenliang and Liu, Benlin and Lu, Jiwen and Zhou, Jie and Hsieh, Cho-Jui},
booktitle = {Advances in Neural Information Processing Systems (NeurIPS)},
year = {2021}
}
@article{rao2022dynamicvit,
title={Dynamic Spatial Sparsification for Efficient Vision Transformers and Convolutional Neural Networks},
author={Rao, Yongming and Liu, Zuyan and Zhao, Wenliang and Zhou, Jie and Lu, Jiwen},
journal={arXiv preprint arXiv:2207.01580},
year={2022}
常见问题
相似工具推荐
stable-diffusion-webui
stable-diffusion-webui 是一个基于 Gradio 构建的网页版操作界面,旨在让用户能够轻松地在本地运行和使用强大的 Stable Diffusion 图像生成模型。它解决了原始模型依赖命令行、操作门槛高且功能分散的痛点,将复杂的 AI 绘图流程整合进一个直观易用的图形化平台。 无论是希望快速上手的普通创作者、需要精细控制画面细节的设计师,还是想要深入探索模型潜力的开发者与研究人员,都能从中获益。其核心亮点在于极高的功能丰富度:不仅支持文生图、图生图、局部重绘(Inpainting)和外绘(Outpainting)等基础模式,还独创了注意力机制调整、提示词矩阵、负向提示词以及“高清修复”等高级功能。此外,它内置了 GFPGAN 和 CodeFormer 等人脸修复工具,支持多种神经网络放大算法,并允许用户通过插件系统无限扩展能力。即使是显存有限的设备,stable-diffusion-webui 也提供了相应的优化选项,让高质量的 AI 艺术创作变得触手可及。
everything-claude-code
everything-claude-code 是一套专为 AI 编程助手(如 Claude Code、Codex、Cursor 等)打造的高性能优化系统。它不仅仅是一组配置文件,而是一个经过长期实战打磨的完整框架,旨在解决 AI 代理在实际开发中面临的效率低下、记忆丢失、安全隐患及缺乏持续学习能力等核心痛点。 通过引入技能模块化、直觉增强、记忆持久化机制以及内置的安全扫描功能,everything-claude-code 能显著提升 AI 在复杂任务中的表现,帮助开发者构建更稳定、更智能的生产级 AI 代理。其独特的“研究优先”开发理念和针对 Token 消耗的优化策略,使得模型响应更快、成本更低,同时有效防御潜在的攻击向量。 这套工具特别适合软件开发者、AI 研究人员以及希望深度定制 AI 工作流的技术团队使用。无论您是在构建大型代码库,还是需要 AI 协助进行安全审计与自动化测试,everything-claude-code 都能提供强大的底层支持。作为一个曾荣获 Anthropic 黑客大奖的开源项目,它融合了多语言支持与丰富的实战钩子(hooks),让 AI 真正成长为懂上
ComfyUI
ComfyUI 是一款功能强大且高度模块化的视觉 AI 引擎,专为设计和执行复杂的 Stable Diffusion 图像生成流程而打造。它摒弃了传统的代码编写模式,采用直观的节点式流程图界面,让用户通过连接不同的功能模块即可构建个性化的生成管线。 这一设计巧妙解决了高级 AI 绘图工作流配置复杂、灵活性不足的痛点。用户无需具备编程背景,也能自由组合模型、调整参数并实时预览效果,轻松实现从基础文生图到多步骤高清修复等各类复杂任务。ComfyUI 拥有极佳的兼容性,不仅支持 Windows、macOS 和 Linux 全平台,还广泛适配 NVIDIA、AMD、Intel 及苹果 Silicon 等多种硬件架构,并率先支持 SDXL、Flux、SD3 等前沿模型。 无论是希望深入探索算法潜力的研究人员和开发者,还是追求极致创作自由度的设计师与资深 AI 绘画爱好者,ComfyUI 都能提供强大的支持。其独特的模块化架构允许社区不断扩展新功能,使其成为当前最灵活、生态最丰富的开源扩散模型工具之一,帮助用户将创意高效转化为现实。
NextChat
NextChat 是一款轻量且极速的 AI 助手,旨在为用户提供流畅、跨平台的大模型交互体验。它完美解决了用户在多设备间切换时难以保持对话连续性,以及面对众多 AI 模型不知如何统一管理的痛点。无论是日常办公、学习辅助还是创意激发,NextChat 都能让用户随时随地通过网页、iOS、Android、Windows、MacOS 或 Linux 端无缝接入智能服务。 这款工具非常适合普通用户、学生、职场人士以及需要私有化部署的企业团队使用。对于开发者而言,它也提供了便捷的自托管方案,支持一键部署到 Vercel 或 Zeabur 等平台。 NextChat 的核心亮点在于其广泛的模型兼容性,原生支持 Claude、DeepSeek、GPT-4 及 Gemini Pro 等主流大模型,让用户在一个界面即可自由切换不同 AI 能力。此外,它还率先支持 MCP(Model Context Protocol)协议,增强了上下文处理能力。针对企业用户,NextChat 提供专业版解决方案,具备品牌定制、细粒度权限控制、内部知识库整合及安全审计等功能,满足公司对数据隐私和个性化管理的高标准要求。
ML-For-Beginners
ML-For-Beginners 是由微软推出的一套系统化机器学习入门课程,旨在帮助零基础用户轻松掌握经典机器学习知识。这套课程将学习路径规划为 12 周,包含 26 节精炼课程和 52 道配套测验,内容涵盖从基础概念到实际应用的完整流程,有效解决了初学者面对庞大知识体系时无从下手、缺乏结构化指导的痛点。 无论是希望转型的开发者、需要补充算法背景的研究人员,还是对人工智能充满好奇的普通爱好者,都能从中受益。课程不仅提供了清晰的理论讲解,还强调动手实践,让用户在循序渐进中建立扎实的技能基础。其独特的亮点在于强大的多语言支持,通过自动化机制提供了包括简体中文在内的 50 多种语言版本,极大地降低了全球不同背景用户的学习门槛。此外,项目采用开源协作模式,社区活跃且内容持续更新,确保学习者能获取前沿且准确的技术资讯。如果你正寻找一条清晰、友好且专业的机器学习入门之路,ML-For-Beginners 将是理想的起点。
ragflow
RAGFlow 是一款领先的开源检索增强生成(RAG)引擎,旨在为大语言模型构建更精准、可靠的上下文层。它巧妙地将前沿的 RAG 技术与智能体(Agent)能力相结合,不仅支持从各类文档中高效提取知识,还能让模型基于这些知识进行逻辑推理和任务执行。 在大模型应用中,幻觉问题和知识滞后是常见痛点。RAGFlow 通过深度解析复杂文档结构(如表格、图表及混合排版),显著提升了信息检索的准确度,从而有效减少模型“胡编乱造”的现象,确保回答既有据可依又具备时效性。其内置的智能体机制更进一步,使系统不仅能回答问题,还能自主规划步骤解决复杂问题。 这款工具特别适合开发者、企业技术团队以及 AI 研究人员使用。无论是希望快速搭建私有知识库问答系统,还是致力于探索大模型在垂直领域落地的创新者,都能从中受益。RAGFlow 提供了可视化的工作流编排界面和灵活的 API 接口,既降低了非算法背景用户的上手门槛,也满足了专业开发者对系统深度定制的需求。作为基于 Apache 2.0 协议开源的项目,它正成为连接通用大模型与行业专有知识之间的重要桥梁。