ASE
ASE(对抗性技能嵌入)是一个专为物理模拟角色设计的开源框架,旨在训练高度可复用的运动控制器。它核心解决了传统方法中角色动作单一、难以灵活组合以及面对干扰容易失衡的难题。通过引入对抗性学习机制,ASE 能够从大量动作捕捉数据中提取通用的“技能嵌入”,让虚拟角色不仅学会走路、跑步、挥剑等基础动作,还能在跌倒后自动起身,甚至在遭受外力投射物撞击时保持稳健。
该项目的独特之处在于其分层控制架构:先训练一个强大的底层控制器来掌握通用物理技能,再在此基础上高效训练针对特定任务(如追踪目标、打击敌人)的高层策略。这种设计大幅降低了新任务的学习成本,实现了技能的即插即用。需要注意的是,官方已标记此代码库为弃用状态,建议用户转向其继任项目 MimicKit 以获取更现代的实现,但 ASE 仍是理解大规模物理角色控制的重要参考。
ASE 主要适合人工智能研究人员、机器人学开发者以及游戏技术工程师使用。如果你正在探索如何让虚拟角色在复杂物理环境中表现出更自然、鲁棒的行为,或者需要构建可复用动作库的基础设施,ASE 提供的理论验证与代码实现将极具参考价值。
使用场景
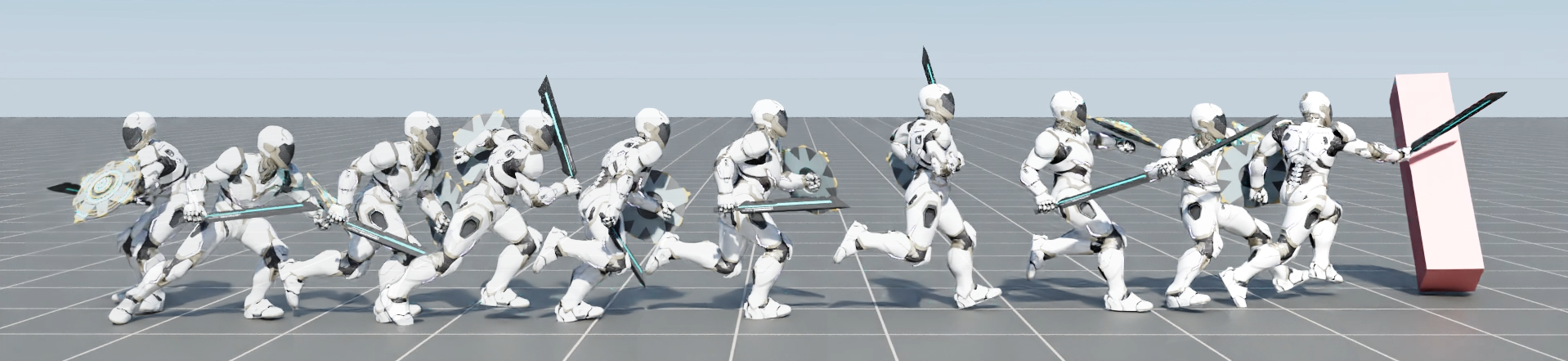
某游戏工作室的物理动画团队正在开发一款硬核动作 RPG,需要让持剑盾的角色在复杂地形中实现流畅的战斗移动与受击反应。
没有 ASE 时
- 动作僵硬不自然:传统强化学习训练出的角色往往只能学会“走路”或“跑步”等基础技能,难以复现挥剑、格挡等复杂的混合动作,导致战斗画面像木偶戏。
- 抗干扰能力极差:角色一旦受到外力撞击或地形起伏影响,极易失去平衡摔倒,且缺乏自动起身或调整姿态的机制,破坏沉浸感。
- 开发周期漫长:每新增一种战斗行为(如“冲刺后重击”),都需要从头采集数据并重新训练底层控制器,重复劳动严重拖慢迭代速度。
- 泛化性不足:针对特定任务训练的模型无法迁移到其他场景,导致代码库中堆积了大量不可复用的独立模型文件。
使用 ASE 后
- 动作逼真流畅:ASE 通过对抗式技能嵌入技术,让角色能直接从动作捕捉数据集中学习并完美复现挥剑、盾牌格挡等高难度物理模拟动作。
- 鲁棒性显著增强:内置的对抗训练机制使角色具备极强的抗干扰能力,即使被投射物击中或滑倒,也能利用学到的“起身”技能自动恢复战斗姿态。
- 高效分层开发:团队只需预训练一次通用的底层控制器(LLC),上层即可快速调用该技能库来训练“朝向目标”或“打击特定位置”等高层任务,无需重复造轮子。
- 技能高度复用:同一个预训练好的 ASE 模型可灵活服务于奔跑、潜行、战斗等多种任务场景,大幅降低了维护成本和存储开销。
ASE 将繁琐的物理角色控制转化为可复用的技能库,让开发者能像搭积木一样快速构建出既逼真又强壮的虚拟角色。
运行环境要求
- Linux
必需 NVIDIA GPU(需支持 Isaac Gym),具体型号和显存未说明,但物理仿真通常建议 8GB+ 显存
未说明
快速开始
对抗技能嵌入
本代码库现已废弃。 请前往 MimicKit 查看我们最新且更易用的算法实现版本。
论文配套代码:
“ASE:用于物理模拟角色的大规模可重用对抗技能嵌入”
(https://xbpeng.github.io/projects/ASE/index.html)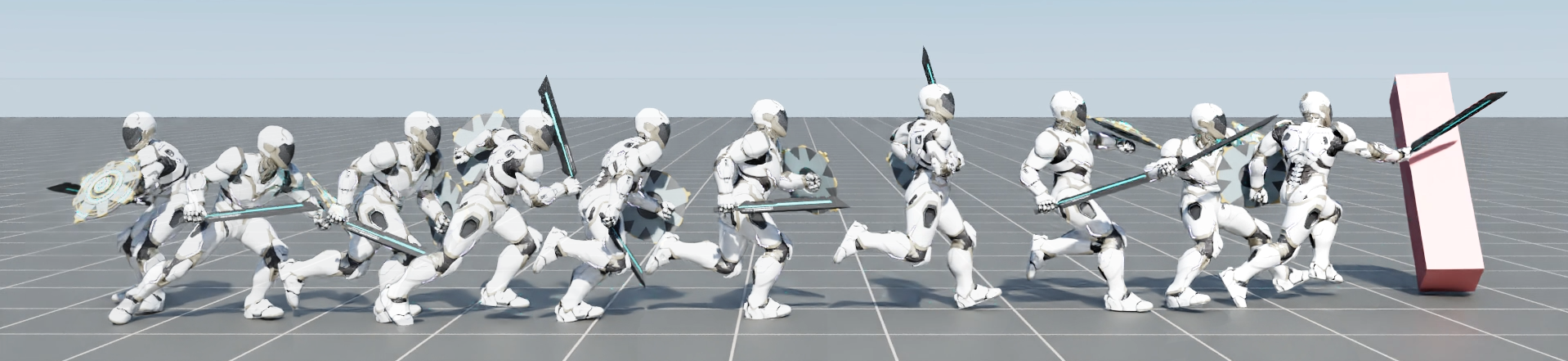
安装
从 官网 下载 Isaac Gym,然后按照安装说明进行操作。
在 Isaac Gym 安装完成后,再安装本仓库所需的外部依赖:
pip install -r requirements.txt
ASE
预训练
首先,可以通过以下命令训练一个 ASE 模型,以模仿一组运动片段数据集:
python ase/run.py --task HumanoidAMPGetup --cfg_env ase/data/cfg/humanoid_ase_sword_shield_getup.yaml --cfg_train ase/data/cfg/train/rlg/ase_humanoid.yaml --motion_file ase/data/motions/reallusion_sword_shield/dataset_reallusion_sword_shield.yaml --headless
--motion_file 可以用来指定模型应模仿的一组运动片段数据集。
任务 HumanoidAMPGetup 将训练一个模型,使其能够模仿一组运动片段,并在摔倒后成功起身。
在训练过程中,最新的检查点文件 Humanoid.pth 会定期保存至 output/ 目录下,同时还会生成 TensorBoard 日志。--headless 参数用于禁用可视化功能。若需查看仿真过程,只需移除该标志即可。要测试已训练好的模型,可以使用以下命令:
python ase/run.py --test --task HumanoidAMPGetup --num_envs 16 --cfg_env ase/data/cfg/humanoid_ase_sword_shield_getup.yaml --cfg_train ase/data/cfg/train/rlg/ase_humanoid.yaml --motion_file ase/data/motions/reallusion_sword_shield/dataset_reallusion_sword_shield.yaml --checkpoint [路径到 ASE 检查点]
您还可以通过 --task HumanoidPerturb 来测试模型的鲁棒性,该任务将向角色发射投射物。
任务训练
在 ASE 低级控制器完成训练后,便可将其用于训练特定任务的高级控制器。以下命令将使用预训练的 ASE 模型,执行目标朝向任务:
python ase/run.py --task HumanoidHeading --cfg_env ase/data/cfg/humanoid_sword_shield_heading.yaml --cfg_train ase/data/cfg/train/rlg/hrl_humanoid.yaml --motion_file ase/data/motions/reallusion_sword_shield/RL_Avatar_Idle_Ready_Motion.npy --llc_checkpoint [路径到 LLC 检查点] --headless
--llc_checkpoint 用于指定低级控制器所使用的检查点。预训练的 ASE 低级控制器可在 ase/data/models/ase_llc_reallusion_sword_shield.pth 中找到。
--task 指定角色应执行的任务,而 --cfg_env 则用于指定该任务对应的环境配置。内置任务及其对应的配置文件如下:
HumanoidReach:ase/data/cfg/humanoid_sword_shield_reach.yaml
HumanoidHeading:ase/data/cfg/humanoid_sword_shield_heading.yaml
HumanoidLocation:ase/data/cfg/humanoid_sword_shield_location.yaml
HumanoidStrike:ase/data/cfg/humanoid_sword_shield_strike.yaml
要测试已训练好的模型,可以使用以下命令:
python ase/run.py --test --task HumanoidHeading --num_envs 16 --cfg_env ase/data/cfg/humanoid_sword_shield_heading.yaml --cfg_train ase/data/cfg/train/rlg/hrl_humanoid.yaml --motion_file ase/data/motions/reallusion_sword_shield/RL_Avatar_Idle_Ready_Motion.npy --llc_checkpoint [路径到 LLC 检查点] --checkpoint [路径到 HLC 检查点]
预训练模型
预训练模型已提供于 ase/data/models/ 目录中。要运行预训练的 ASE 低级控制器,可使用以下命令:
python ase/run.py --test --task HumanoidAMPGetup --num_envs 16 --cfg_env ase/data/cfg/humanoid_ase_sword_shield_getup.yaml --cfg_train ase/data/cfg/train/rlg/ase_humanoid.yaml --motion_file ase/data/motions/reallusion_sword_shield/dataset_reallusion_sword_shield.yaml --checkpoint ase/data/models/ase_llc_reallusion_sword_shield.pth
不同任务的预训练模型可通过以下命令运行:
朝向任务:
python ase/run.py --test --task HumanoidHeading --num_envs 16 --cfg_env ase/data/cfg/humanoid_sword_shield_heading.yaml --cfg_train ase/data/cfg/train/rlg/hrl_humanoid.yaml --motion_file ase/data/motions/reallusion_sword_shield/RL_Avatar_Idle_Ready_Motion.npy --llc_checkpoint ase/data/models/ase_llc_reallusion_sword_shield.pth --checkpoint ase/data/models/ase_hlc_heading_reallusion_sword_shield.pth
接近任务:
python ase/run.py --test --task HumanoidReach --num_envs 16 --cfg_env ase/data/cfg/humanoid_sword_shield_reach.yaml --cfg_train ase/data/cfg/train/rlg/hrl_humanoid.yaml --motion_file ase/data/motions/reallusion_sword_shield/RL_Avatar_Idle_Ready_Motion.npy --llc_checkpoint ase/data/models/ase_llc_reallusion_sword_shield.pth --checkpoint ase/data/models/ase_hlc_reach_reallusion_sword_shield.pth
位置任务:
python ase/run.py --test --task HumanoidLocation --num_envs 16 --cfg_env ase/data/cfg/humanoid_sword_shield_location.yaml --cfg_train ase/data/cfg/train/rlg/hrl_humanoid.yaml --motion_file ase/data/motions/reallusion_sword_shield/RL_Avatar_Idle_Ready_Motion.npy --llc_checkpoint ase/data/models/ase_llc_reallusion_sword_shield.pth --checkpoint ase/data/models/ase_hlc_location_reallusion_sword_shield.pth
打击任务:
python ase/run.py --test --task HumanoidStrike --num_envs 16 --cfg_env ase/data/cfg/humanoid_sword_shield_strike.yaml --cfg_train ase/data/cfg/train/rlg/hrl_humanoid.yaml --motion_file ase/data/motions/reallusion_sword_shield/RL_Avatar_Idle_Ready_Motion.npy --llc_checkpoint ase/data/models/ase_llc_reallusion_sword_shield.pth --checkpoint ase/data/models/ase_hlc_strike_reallusion_sword_shield.pth
AMP
我们还提供了一套对抗运动先验(Adversarial Motion Priors)的实现方案(https://xbpeng.github.io/projects/AMP/index.html)。可以通过以下命令训练一个模型,使其能够模仿给定的参考运动:
python ase/run.py --task HumanoidAMP --cfg_env ase/data/cfg/humanoid_sword_shield.yaml --cfg_train ase/data/cfg/train/rlg/amp_humanoid.yaml --motion_file ase/data/motions/reallusion_sword_shield/RL_Avatar_Atk_2xCombo01_Motion.npy --headless
训练好的模型随后可用于以下测试:
python ase/run.py --test --task HumanoidAMP --num_envs 16 --cfg_env ase/data/cfg/humanoid_sword_shield.yaml --cfg_train ase/data/cfg/train/rlg/amp_humanoid.yaml --motion_file ase/data/motions/reallusion_sword_shield/RL_Avatar_Atk_2xCombo01_Motion.npy --checkpoint [路径到 AMP 检查点]
运动数据
运动片段位于 ase/data/motions/ 目录下。单个运动片段以 .npy 文件形式存储。运动数据集则通过 .yaml 文件进行指定,该文件包含要纳入数据集的运动片段列表。可通过以下命令对运动片段进行可视化:
python ase/run.py --test --task HumanoidViewMotion --num_envs 2 --cfg_env ase/data/cfg/humanoid_sword_shield.yaml --cfg_train ase/data/cfg/train/rlg/amp_humanoid.yaml --motion_file ase/data/motions/reallusion_sword_shield/RL_Avatar_Atk_2xCombo01_Motion.npy
--motion_file 可用于可视化单个运动片段 .npy 文件,或用于可视化运动数据集 .yaml 文件。
本运动数据由 Reallusion 提供,仅供非商业用途。原始运动数据可在此处获取:
https://actorcore.reallusion.com/motion/pack/studio-mocap-sword-and-shield-stunts
https://actorcore.reallusion.com/motion/pack/studio-mocap-sword-and-shield-moves
如需将新运动片段重新定向至角色上,可参考 ase/poselib/retarget_motion.py 中的示例重定向脚本。
常见问题
相似工具推荐
ML-For-Beginners
ML-For-Beginners 是由微软推出的一套系统化机器学习入门课程,旨在帮助零基础用户轻松掌握经典机器学习知识。这套课程将学习路径规划为 12 周,包含 26 节精炼课程和 52 道配套测验,内容涵盖从基础概念到实际应用的完整流程,有效解决了初学者面对庞大知识体系时无从下手、缺乏结构化指导的痛点。 无论是希望转型的开发者、需要补充算法背景的研究人员,还是对人工智能充满好奇的普通爱好者,都能从中受益。课程不仅提供了清晰的理论讲解,还强调动手实践,让用户在循序渐进中建立扎实的技能基础。其独特的亮点在于强大的多语言支持,通过自动化机制提供了包括简体中文在内的 50 多种语言版本,极大地降低了全球不同背景用户的学习门槛。此外,项目采用开源协作模式,社区活跃且内容持续更新,确保学习者能获取前沿且准确的技术资讯。如果你正寻找一条清晰、友好且专业的机器学习入门之路,ML-For-Beginners 将是理想的起点。
ragflow
RAGFlow 是一款领先的开源检索增强生成(RAG)引擎,旨在为大语言模型构建更精准、可靠的上下文层。它巧妙地将前沿的 RAG 技术与智能体(Agent)能力相结合,不仅支持从各类文档中高效提取知识,还能让模型基于这些知识进行逻辑推理和任务执行。 在大模型应用中,幻觉问题和知识滞后是常见痛点。RAGFlow 通过深度解析复杂文档结构(如表格、图表及混合排版),显著提升了信息检索的准确度,从而有效减少模型“胡编乱造”的现象,确保回答既有据可依又具备时效性。其内置的智能体机制更进一步,使系统不仅能回答问题,还能自主规划步骤解决复杂问题。 这款工具特别适合开发者、企业技术团队以及 AI 研究人员使用。无论是希望快速搭建私有知识库问答系统,还是致力于探索大模型在垂直领域落地的创新者,都能从中受益。RAGFlow 提供了可视化的工作流编排界面和灵活的 API 接口,既降低了非算法背景用户的上手门槛,也满足了专业开发者对系统深度定制的需求。作为基于 Apache 2.0 协议开源的项目,它正成为连接通用大模型与行业专有知识之间的重要桥梁。
PaddleOCR
PaddleOCR 是一款基于百度飞桨框架开发的高性能开源光学字符识别工具包。它的核心能力是将图片、PDF 等文档中的文字提取出来,转换成计算机可读取的结构化数据,让机器真正“看懂”图文内容。 面对海量纸质或电子文档,PaddleOCR 解决了人工录入效率低、数字化成本高的问题。尤其在人工智能领域,它扮演着连接图像与大型语言模型(LLM)的桥梁角色,能将视觉信息直接转化为文本输入,助力智能问答、文档分析等应用场景落地。 PaddleOCR 适合开发者、算法研究人员以及有文档自动化需求的普通用户。其技术优势十分明显:不仅支持全球 100 多种语言的识别,还能在 Windows、Linux、macOS 等多个系统上运行,并灵活适配 CPU、GPU、NPU 等各类硬件。作为一个轻量级且社区活跃的开源项目,PaddleOCR 既能满足快速集成的需求,也能支撑前沿的视觉语言研究,是处理文字识别任务的理想选择。
awesome-machine-learning
awesome-machine-learning 是一份精心整理的机器学习资源清单,汇集了全球优秀的机器学习框架、库和软件工具。面对机器学习领域技术迭代快、资源分散且难以甄选的痛点,这份清单按编程语言(如 Python、C++、Go 等)和应用场景(如计算机视觉、自然语言处理、深度学习等)进行了系统化分类,帮助使用者快速定位高质量项目。 它特别适合开发者、数据科学家及研究人员使用。无论是初学者寻找入门库,还是资深工程师对比不同语言的技术选型,都能从中获得极具价值的参考。此外,清单还延伸提供了免费书籍、在线课程、行业会议、技术博客及线下聚会等丰富资源,构建了从学习到实践的全链路支持体系。 其独特亮点在于严格的维护标准:明确标记已停止维护或长期未更新的项目,确保推荐内容的时效性与可靠性。作为机器学习领域的“导航图”,awesome-machine-learning 以开源协作的方式持续更新,旨在降低技术探索门槛,让每一位从业者都能高效地站在巨人的肩膀上创新。
scikit-learn
scikit-learn 是一个基于 Python 构建的开源机器学习库,依托于 SciPy、NumPy 等科学计算生态,旨在让机器学习变得简单高效。它提供了一套统一且简洁的接口,涵盖了从数据预处理、特征工程到模型训练、评估及选择的全流程工具,内置了包括线性回归、支持向量机、随机森林、聚类等在内的丰富经典算法。 对于希望快速验证想法或构建原型的数据科学家、研究人员以及 Python 开发者而言,scikit-learn 是不可或缺的基础设施。它有效解决了机器学习入门门槛高、算法实现复杂以及不同模型间调用方式不统一的痛点,让用户无需重复造轮子,只需几行代码即可调用成熟的算法解决分类、回归、聚类等实际问题。 其核心技术亮点在于高度一致的 API 设计风格,所有估算器(Estimator)均遵循相同的调用逻辑,极大地降低了学习成本并提升了代码的可读性与可维护性。此外,它还提供了强大的模型选择与评估工具,如交叉验证和网格搜索,帮助用户系统地优化模型性能。作为一个由全球志愿者共同维护的成熟项目,scikit-learn 以其稳定性、详尽的文档和活跃的社区支持,成为连接理论学习与工业级应用的最
keras
Keras 是一个专为人类设计的深度学习框架,旨在让构建和训练神经网络变得简单直观。它解决了开发者在不同深度学习后端之间切换困难、模型开发效率低以及难以兼顾调试便捷性与运行性能的痛点。 无论是刚入门的学生、专注算法的研究人员,还是需要快速落地产品的工程师,都能通过 Keras 轻松上手。它支持计算机视觉、自然语言处理、音频分析及时间序列预测等多种任务。 Keras 3 的核心亮点在于其独特的“多后端”架构。用户只需编写一套代码,即可灵活选择 TensorFlow、JAX、PyTorch 或 OpenVINO 作为底层运行引擎。这一特性不仅保留了 Keras 一贯的高层易用性,还允许开发者根据需求自由选择:利用 JAX 或 PyTorch 的即时执行模式进行高效调试,或切换至速度最快的后端以获得最高 350% 的性能提升。此外,Keras 具备强大的扩展能力,能无缝从本地笔记本电脑扩展至大规模 GPU 或 TPU 集群,是连接原型开发与生产部署的理想桥梁。