fast3r
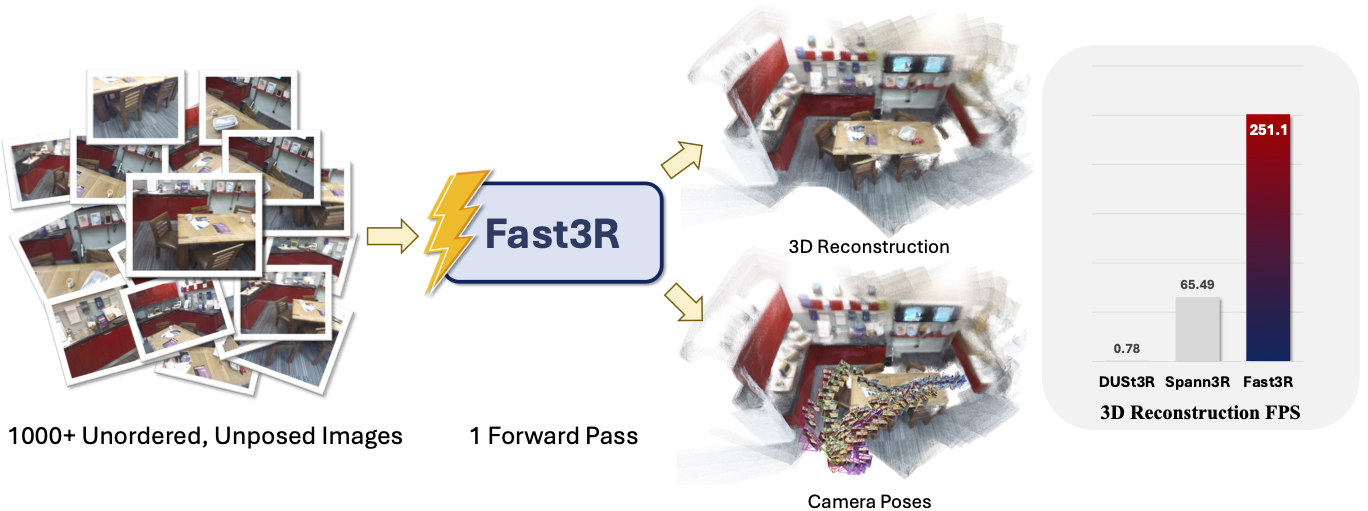
fast3r 是一款来自 CVPR 2025 的高效 3D 重建开源模型,旨在从多张图像中快速构建三维场景。它主要解决了传统方法在处理大规模图像序列时计算耗时过长的问题。凭借创新的技术架构,fast3r 能够在单次计算中完成超过 1000 张图片的重建,大幅提升了处理速度与扩展能力。
fast3r 非常适合计算机视觉开发者、科研人员以及对 3D 技术感兴趣的创作者。开发者可以直接调用其 PyTorch 接口将模型嵌入自己的应用中,研究人员可基于此进行性能对比与改进。普通用户也能通过官方提供的 Gradio 演示界面,上传视频或图片即可实时查看 3D 重建效果及相机姿态。fast3r 提供了预训练模型和详细的使用文档,虽然安装时需要配置 Conda 环境并注意特定模块兼容性,但其带来的效率提升足以弥补这些步骤。如果你正在寻找一种既能保证精度又能应对海量数据输入的快速 3D 解决方案,fast3r 绝对值得尝试。
使用场景
某无人机测绘团队正在为大型物流园区构建高精度三维模型,面对数百个航点拍摄的上千张重叠照片,他们急需高效的解决方案。
没有 fast3r 时
- 传统 SfM 流程处理上千张图片通常需要数小时甚至通宵,漫长的等待时间严重拖慢了项目迭代节奏。
- 受限于显存容量,团队必须对数据进行复杂的分块切割,这不仅增加了配准误差风险,还破坏了场景的整体连续性。
- 每次调整重建参数都需要重新运行整个流程,调试周期漫长,导致问题定位困难且影响最终交付进度。
使用 fast3r 后
- fast3r 凭借单次前向传播能力,能在几分钟内完成千级图像的重建,相比传统方法速度提升数十倍。
- 原生支持大规模输入,无需繁琐的分块预处理,直接输出连贯的稠密点云和精确的相机轨迹。
- 工程师可现场实时预览重建结果,迅速发现遮挡或模糊区域并安排补拍,大幅提高了数据采集的一次成功率。
fast3r 通过颠覆性的推理速度,将大规模三维重建从“离线批处理”转变为“即时交互”,彻底释放了空间计算的开发潜力。
运行环境要求
- Linux
- macOS
需要 NVIDIA GPU,CUDA 12.4,显存大小未明确说明
未说明
快速开始
⚡️Fast3R:迈向单次前向传播完成 1000+ 图像的 3D 重建
${{\color{Red}\Huge{\textsf{ CVPR\ 2025\ }}}}$
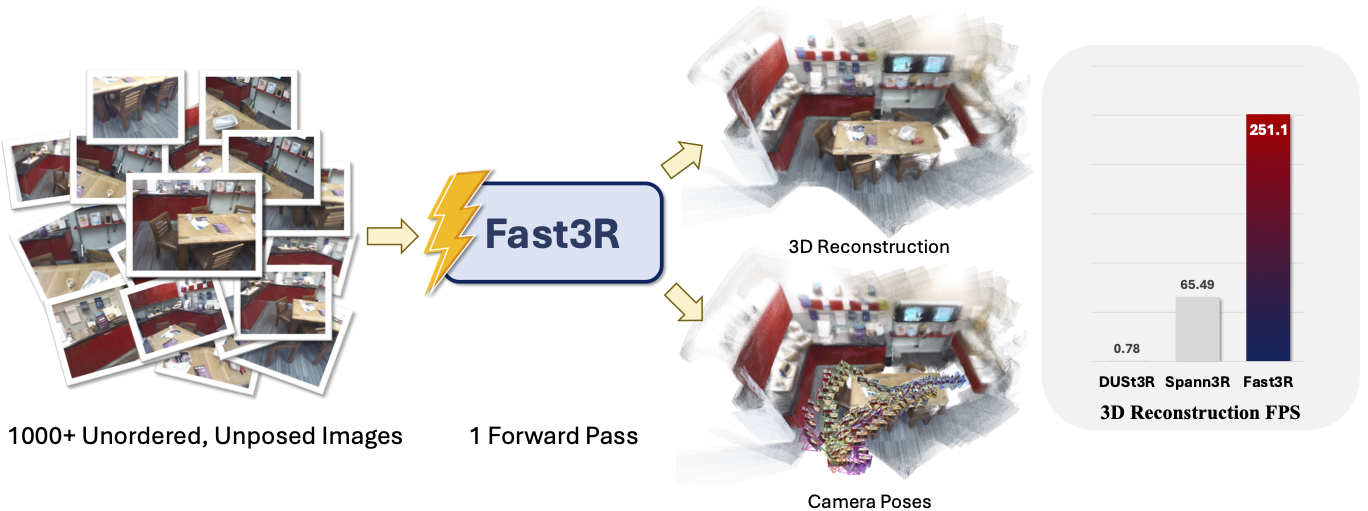
Fast3R: Towards 3D Reconstruction of 1000+ Images in One Forward Pass 的官方实现,CVPR 2025
Jianing Yang, Alexander Sax, Kevin J. Liang, Mikael Henaff, Hao Tang, Ang Cao, Joyce Chai, Franziska Meier, Matt Feiszli
安装
# clone project
git clone https://github.com/facebookresearch/fast3r
cd fast3r
# create conda environment
conda create -n fast3r python=3.11 cmake=3.14.0 -y
conda activate fast3r
# install PyTorch (adjust cuda version according to your system)
conda install pytorch torchvision torchaudio pytorch-cuda=12.4 nvidia/label/cuda-12.4.0::cuda-toolkit -c pytorch -c nvidia
# install requirements
pip install -r requirements.txt
# install fast3r as a package (so you can import fast3r and use it in your own project)
pip install -e .
注意:请确保不要像 DUSt3R 那样安装 cuROPE 模块,否则会破坏 Fast3R 的预测结果。
演示
使用以下命令运行演示:
python fast3r/viz/demo.py
这将自动从 Hugging Face 模型 下载预训练模型权重和配置。
该演示是一个 Gradio 界面,您可以上传图像或视频,并可视化 3D 重建和相机姿态估计。
fast3r/viz/demo.py 也可作为使用模型进行推理的示例。
左:上传视频。右:可视化 3D 重建
点击此处查看示例:可视化置信度热力图 + 逐帧播放 + 渲染 GIF
在自己的项目中使用 Fast3R
要在自己的项目中使用 Fast3R,您可以从 fast3r.models.fast3r 导入 Fast3R 类,并将其作为常规的 PyTorch 模型使用。
import torch
from fast3r.dust3r.utils.image import load_images
from fast3r.dust3r.inference_multiview import inference
from fast3r.models.fast3r import Fast3R
from fast3r.models.multiview_dust3r_module import MultiViewDUSt3RLitModule
# --- Setup ---
# Load the model from Hugging Face
model = Fast3R.from_pretrained("jedyang97/Fast3R_ViT_Large_512") # If you have networking issues, try pre-download the HF checkpoint dir and change the path here to a local directory
device = torch.device("cuda" if torch.cuda.is_available() else "cpu")
model = model.to(device)
# Create a lightweight lightning module wrapper for the model.
# This provides functions to estimate camera poses, evaluate 3D reconstruction, etc.
lit_module = MultiViewDUSt3RLitModule.load_for_inference(model)
# Set model to evaluation mode
model.eval()
lit_module.eval()
# --- Load Images ---
# Provide a list of image file paths. Images can come from different cameras and aspect ratios.
filelist = ["path/to/image1.jpg", "path/to/image2.jpg", "path/to/image3.jpg"]
images = load_images(filelist, size=512, verbose=True)
# --- Run Inference ---
# The inference function returns a dictionary with predictions and view information.
output_dict, profiling_info = inference(
images,
model,
device,
dtype=torch.float32, # or use torch.bfloat16 if supported
verbose=True,
profiling=True,
)
# --- Estimate Camera Poses ---
# This step estimates the camera-to-world (c2w) poses for each view using PnP.
poses_c2w_batch, estimated_focals = MultiViewDUSt3RLitModule.estimate_camera_poses(
output_dict['preds'],
niter_PnP=100,
focal_length_estimation_method='first_view_from_global_head'
)
# poses_c2w_batch is a list; the first element contains the estimated poses for each view.
camera_poses = poses_c2w_batch[0]
# Print camera poses for all views.
for view_idx, pose in enumerate(camera_poses):
print(f"Camera Pose for view {view_idx}:")
print(pose.shape) # np.array of shape (4, 4), the camera-to-world transformation matrix
# --- Extract 3D Point Clouds for Each View ---
# Each element in output_dict['preds'] corresponds to a view's point map.
for view_idx, pred in enumerate(output_dict['preds']):
point_cloud = pred['pts3d_in_other_view'].cpu().numpy()
print(f"Point Cloud Shape for view {view_idx}: {point_cloud.shape}") # shape: (1, 368, 512, 3), i.e., (1, Height, Width, XYZ)
训练
使用 configs/experiment/ 中选定的实验配置来训练模型
python fast3r/train.py experiment=super_long_training/super_long_training
您可以按照 Hydra override syntax 从命令行覆盖任何参数:
python fast3r/train.py experiment=super_long_training/super_long_training trainer.max_epochs=20 trainer.num_nodes=2
若要使用 Slurm 提交多节点训练作业,请使用以下命令:
python scripts/slurm/submit_train.py --nodes=<NODES> --experiment=<EXPERIMENT>
训练完成后,您可以使用 lightning checkpoint 通过以下命令运行演示:
python fast3r/viz/demo.py --is_lightning_checkpoint --checkpoint_dir=/path/to/super_long_training_999999
评估
要在 3D 重建 (3D reconstruction) 或相机位姿估计 (camera pose estimation) 任务上进行评估,请运行:
python fast3r/eval.py eval=<eval_config>
<eval_config> 可以是 configs/eval/ 中的任何评估配置。例如:
ablation_recon_better_inference_hp/ablation_recon_better_inference_hp评估在 DTU、7-Scenes 和 Neural-RGBD 数据集上的 3D 重建效果。eval_cam_pose/eval_cam_pose_10views评估在 CO3D 数据集上 10 个视角的相机位姿估计效果。
要在 RealEstate10K 数据集上评估相机位姿,请运行:
python scripts/fast3r_re10k_pose_eval.py --subset_file scripts/re10k_test_1800.txt
要在 Tanks and Temples、ETH-3D、DTU 和 ScanNet 数据集上评估多视图深度估计 (multi-view depth estimation),请遵循 robustmvd 的数据下载和准备指南,将该仓库的 requirements.txt 安装到当前的 conda 环境 (conda environment) 中,然后运行:
python scripts/robustmvd_eval.py
数据集预处理
请遵循 DUSt3R 的数据预处理说明 来准备训练和评估所需的数据。预处理后的数据与此仓库中的 多视图数据加载器 (multi-view dataloaders) 兼容。
对于用于评估的 DTU、7-Scene 和 NRGBD 数据集的预处理,我们遵循 Spann3r 的数据处理说明。
常见问题
- Q: 启动演示时出现
httpcore.ConnectError: All connection attempts failed?- 参见 #34。将示例视频下载到本地目录。
- Q: BlendedMVS 的数据预处理中,缺少
train_list.txt?- 参见 #33。
- Q: 如何加载检查点 (checkpoint) 以微调 (fine-tune) Fast3R?
- 参见 #25
- Q: 在 Windows 上运行演示?(TypeError: cannot pickle '_thread.RLock' object)
- 参见 #28。似乎还需要更多工作才能使演示与 Windows 兼容——我们希望社区能贡献一个 Pull Request (PR)!
- Q: 点云 (point cloud) 输出完全混乱?
- 参见 #21。请确保未安装 cuROPE 模块。
- Q: 我的 GPU (图形处理器) 不支持 FlashAttention /
No available kernel. Aborting execution?- 参见 #17。改用
attn_implementation=pytorch_auto选项。
- 参见 #17。改用
- Q:
TypeError: Fast3R.__init__() missing 3 required positional arguments: 'encoder_args', 'decoder_args', and 'head_args'- 参见 #7。这是由于在某些国家(如中国)从 Huggingface 下载模型时的网络问题导致的——请使用有效的网络配置预先下载模型检查点 (checkpoint),并使用本地路径加载模型。
许可证
代码和模型均根据 FAIR NC Research License 许可。
贡献
引用
@InProceedings{Yang_2025_Fast3R,
title={Fast3R: Towards 3D Reconstruction of 1000+ Images in One Forward Pass},
author={Jianing Yang and Alexander Sax and Kevin J. Liang and Mikael Henaff and Hao Tang and Ang Cao and Joyce Chai and Franziska Meier and Matt Feiszli},
booktitle={Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)},
month={June},
year={2025},
}
致谢
Fast3R 建立在一些杰出的开源项目基础之上。我们衷心感谢这些项目及其社区的贡献,他们的努力极大地推动了该领域的发展并使这项工作成为可能。
星标历史

常见问题
相似工具推荐
stable-diffusion-webui
stable-diffusion-webui 是一个基于 Gradio 构建的网页版操作界面,旨在让用户能够轻松地在本地运行和使用强大的 Stable Diffusion 图像生成模型。它解决了原始模型依赖命令行、操作门槛高且功能分散的痛点,将复杂的 AI 绘图流程整合进一个直观易用的图形化平台。 无论是希望快速上手的普通创作者、需要精细控制画面细节的设计师,还是想要深入探索模型潜力的开发者与研究人员,都能从中获益。其核心亮点在于极高的功能丰富度:不仅支持文生图、图生图、局部重绘(Inpainting)和外绘(Outpainting)等基础模式,还独创了注意力机制调整、提示词矩阵、负向提示词以及“高清修复”等高级功能。此外,它内置了 GFPGAN 和 CodeFormer 等人脸修复工具,支持多种神经网络放大算法,并允许用户通过插件系统无限扩展能力。即使是显存有限的设备,stable-diffusion-webui 也提供了相应的优化选项,让高质量的 AI 艺术创作变得触手可及。
ComfyUI
ComfyUI 是一款功能强大且高度模块化的视觉 AI 引擎,专为设计和执行复杂的 Stable Diffusion 图像生成流程而打造。它摒弃了传统的代码编写模式,采用直观的节点式流程图界面,让用户通过连接不同的功能模块即可构建个性化的生成管线。 这一设计巧妙解决了高级 AI 绘图工作流配置复杂、灵活性不足的痛点。用户无需具备编程背景,也能自由组合模型、调整参数并实时预览效果,轻松实现从基础文生图到多步骤高清修复等各类复杂任务。ComfyUI 拥有极佳的兼容性,不仅支持 Windows、macOS 和 Linux 全平台,还广泛适配 NVIDIA、AMD、Intel 及苹果 Silicon 等多种硬件架构,并率先支持 SDXL、Flux、SD3 等前沿模型。 无论是希望深入探索算法潜力的研究人员和开发者,还是追求极致创作自由度的设计师与资深 AI 绘画爱好者,ComfyUI 都能提供强大的支持。其独特的模块化架构允许社区不断扩展新功能,使其成为当前最灵活、生态最丰富的开源扩散模型工具之一,帮助用户将创意高效转化为现实。
ML-For-Beginners
ML-For-Beginners 是由微软推出的一套系统化机器学习入门课程,旨在帮助零基础用户轻松掌握经典机器学习知识。这套课程将学习路径规划为 12 周,包含 26 节精炼课程和 52 道配套测验,内容涵盖从基础概念到实际应用的完整流程,有效解决了初学者面对庞大知识体系时无从下手、缺乏结构化指导的痛点。 无论是希望转型的开发者、需要补充算法背景的研究人员,还是对人工智能充满好奇的普通爱好者,都能从中受益。课程不仅提供了清晰的理论讲解,还强调动手实践,让用户在循序渐进中建立扎实的技能基础。其独特的亮点在于强大的多语言支持,通过自动化机制提供了包括简体中文在内的 50 多种语言版本,极大地降低了全球不同背景用户的学习门槛。此外,项目采用开源协作模式,社区活跃且内容持续更新,确保学习者能获取前沿且准确的技术资讯。如果你正寻找一条清晰、友好且专业的机器学习入门之路,ML-For-Beginners 将是理想的起点。
ragflow
RAGFlow 是一款领先的开源检索增强生成(RAG)引擎,旨在为大语言模型构建更精准、可靠的上下文层。它巧妙地将前沿的 RAG 技术与智能体(Agent)能力相结合,不仅支持从各类文档中高效提取知识,还能让模型基于这些知识进行逻辑推理和任务执行。 在大模型应用中,幻觉问题和知识滞后是常见痛点。RAGFlow 通过深度解析复杂文档结构(如表格、图表及混合排版),显著提升了信息检索的准确度,从而有效减少模型“胡编乱造”的现象,确保回答既有据可依又具备时效性。其内置的智能体机制更进一步,使系统不仅能回答问题,还能自主规划步骤解决复杂问题。 这款工具特别适合开发者、企业技术团队以及 AI 研究人员使用。无论是希望快速搭建私有知识库问答系统,还是致力于探索大模型在垂直领域落地的创新者,都能从中受益。RAGFlow 提供了可视化的工作流编排界面和灵活的 API 接口,既降低了非算法背景用户的上手门槛,也满足了专业开发者对系统深度定制的需求。作为基于 Apache 2.0 协议开源的项目,它正成为连接通用大模型与行业专有知识之间的重要桥梁。
PaddleOCR
PaddleOCR 是一款基于百度飞桨框架开发的高性能开源光学字符识别工具包。它的核心能力是将图片、PDF 等文档中的文字提取出来,转换成计算机可读取的结构化数据,让机器真正“看懂”图文内容。 面对海量纸质或电子文档,PaddleOCR 解决了人工录入效率低、数字化成本高的问题。尤其在人工智能领域,它扮演着连接图像与大型语言模型(LLM)的桥梁角色,能将视觉信息直接转化为文本输入,助力智能问答、文档分析等应用场景落地。 PaddleOCR 适合开发者、算法研究人员以及有文档自动化需求的普通用户。其技术优势十分明显:不仅支持全球 100 多种语言的识别,还能在 Windows、Linux、macOS 等多个系统上运行,并灵活适配 CPU、GPU、NPU 等各类硬件。作为一个轻量级且社区活跃的开源项目,PaddleOCR 既能满足快速集成的需求,也能支撑前沿的视觉语言研究,是处理文字识别任务的理想选择。
tesseract
Tesseract 是一款历史悠久且备受推崇的开源光学字符识别(OCR)引擎,最初由惠普实验室开发,后由 Google 维护,目前由全球社区共同贡献。它的核心功能是将图片中的文字转化为可编辑、可搜索的文本数据,有效解决了从扫描件、照片或 PDF 文档中提取文字信息的难题,是数字化归档和信息自动化的重要基础工具。 在技术层面,Tesseract 展现了强大的适应能力。从版本 4 开始,它引入了基于长短期记忆网络(LSTM)的神经网络 OCR 引擎,显著提升了行识别的准确率;同时,为了兼顾旧有需求,它依然支持传统的字符模式识别引擎。Tesseract 原生支持 UTF-8 编码,开箱即用即可识别超过 100 种语言,并兼容 PNG、JPEG、TIFF 等多种常见图像格式。输出方面,它灵活支持纯文本、hOCR、PDF、TSV 等多种格式,方便后续数据处理。 Tesseract 主要面向开发者、研究人员以及需要构建文档处理流程的企业用户。由于它本身是一个命令行工具和库(libtesseract),不包含图形用户界面(GUI),因此最适合具备一定编程能力的技术人员集成到自动化脚本或应用程序中