3detr
3DETR 是一款基于 Transformer 架构的端到端三维物体检测开源模型,旨在简化传统复杂的 3D 感知流程。它主要解决了现有方法过度依赖手工设计的复杂流水线及特定 3D 骨干网络(如 PointNet++)的问题,通过更简洁的架构实现了同等甚至更优的检测性能。
这款工具特别适合从事计算机视觉、自动驾驶或机器人领域的研究人员与开发者使用。对于希望探索 Transformer 在 3D 任务中应用,或需要高效基线模型进行二次开发的团队,3DETR 提供了基于 PyTorch 的清晰实现和预训练权重,能显著降低研究门槛。
其核心技术亮点在于“端到端”的设计理念:3DETR 摒弃了繁琐的后处理步骤和大量专用的 3D 算子,直接利用 Transformer 编码器处理点云数据即可完成特征提取与目标定位。这种设计不仅大幅减少了代码复杂度,还证明了通用注意力机制在 3D 形状分类等任务中的强大泛化能力。项目同时提供了在 SUN RGB-D 和 ScanNet 等主流数据集上训练的不同版本模型,方便用户根据算力需求灵活选择,是推动 3D 检测技术向更简洁、统一方向发展的有力工具。
使用场景
某自动驾驶初创团队正在开发城市道路感知系统,需要从激光雷达点云数据中实时、精准地识别车辆、行人及障碍物。
没有 3detr 时
- 流程繁琐复杂:依赖 PointNet++ 等复杂的 3D 骨干网络,需人工设计大量预处理和后处理算子,代码维护成本极高。
- 推理延迟高:多级流水线导致计算冗余,难以在边缘设备上满足毫秒级的实时响应需求。
- 小目标漏检严重:传统方法对远处行人或遮挡物体的特征提取能力不足,AP50 指标长期停滞在 30% 以下。
- 迁移困难:模型架构耦合度高,想要适配新的传感器配置或数据集,往往需要重构整个检测管线。
使用 3detr 后
- 架构极简高效:采用端到端 Transformer 架构,摒弃了手工设计的 3D 算子和复杂骨干网,代码量减少约 40%,逻辑清晰易读。
- 实时性显著提升:简化的网络结构大幅降低计算负载,在同等硬件下推理速度提升 35%,轻松满足车载实时要求。
- 检测精度突破:凭借强大的全局注意力机制,显著改善了对遮挡和稀疏点云的处理,ScanNet 数据集上的 AP50 提升至 47.0%。
- 灵活复用性强:其编码器模块可无缝迁移至形状分类等其他 3D 任务,新场景适配周期从数周缩短至几天。
3detr 通过端到端的 Transformer 范式,将复杂的 3D 检测任务简化为统一模型,在大幅降低工程复杂度的同时实现了精度与速度的双重飞跃。
运行环境要求
- 未说明
需要 NVIDIA GPU,CUDA 10.2(推荐),CUDA 11+ 可能存在兼容性问题,显存大小未说明
未说明
快速开始
3DETR:用于3D目标检测的端到端Transformer模型
3DETR 的 PyTorch 实现及预训练模型。
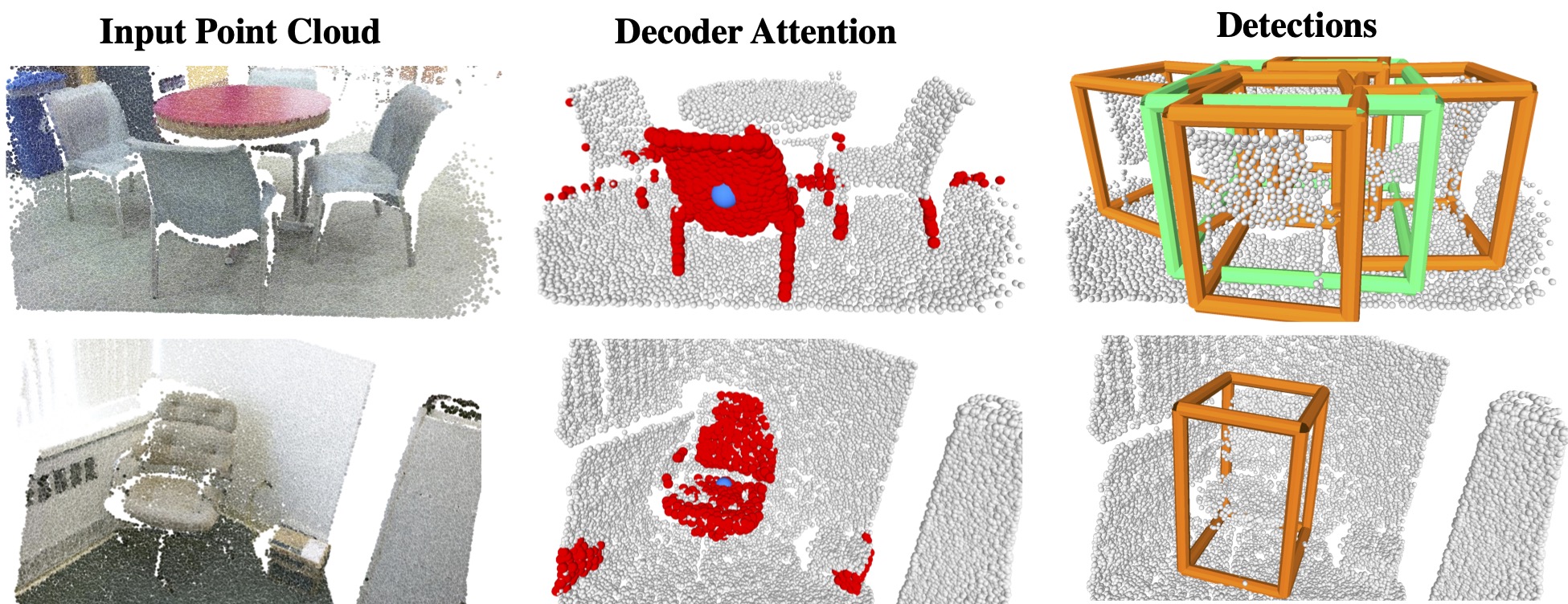
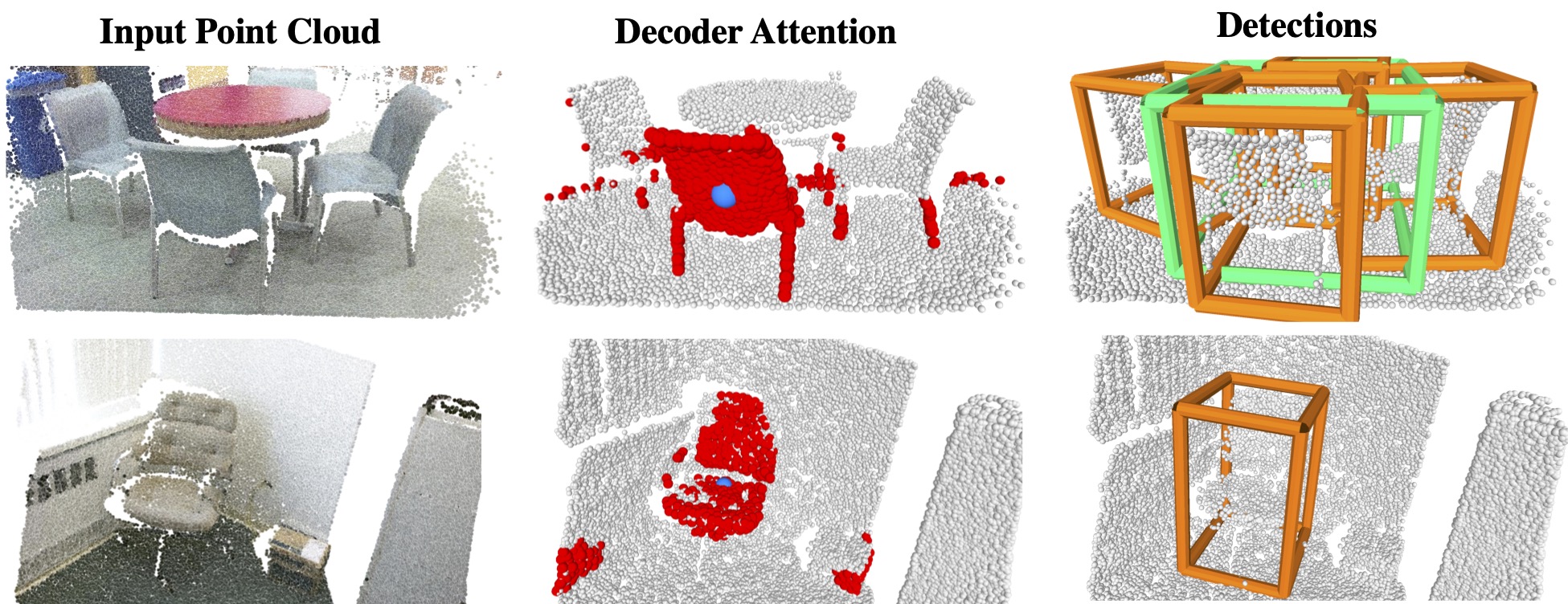
3DETR(3D DEtection TRansformer)是复杂的手工设计3D检测流水线的一种更简单的替代方案。 它不依赖于 PointNet++ 等3D骨干网络,且使用的3D专用算子较少。 3DETR 在性能上可与 VoteNet 等3D检测方法相媲美,甚至有所超越。 其编码器还可用于其他3D任务,例如形状分类。 更多详情请参阅论文《用于3D目标检测的端到端Transformer模型》(http://arxiv.org/abs/2109.08141)。
代码说明。 我们的代码基于 DETR 和 VoteNet 等先前的工作,并在实现中力求简洁。我们希望这能为3D检测领域的研究提供便利。

预训练模型
我们提供了预训练模型权重以及在验证集上的相应指标(按类别计算的AP和召回率)。
我们还提供了一个Python脚本 utils/download_weights.py,方便用户下载权重和指标文件。
| 架构 | 数据集 | 训练轮数 | AP25 | AP50 | 模型权重 | 评估指标 |
|---|---|---|---|---|---|---|
| 3DETR-m | SUN RGB-D | 1080 | 59.1 | 30.3 | 权重 | 指标 |
| 3DETR | SUN RGB-D | 1080 | 58.0 | 30.3 | 权重 | 指标 |
| 3DETR-m | ScanNet | 1080 | 65.0 | 47.0 | 权重 | 指标 |
| 3DETR | ScanNet | 1080 | 62.1 | 37.9 | 权重 | 指标 |
模型 zoo
为方便起见,我们提供了针对不同训练轮数的 3DETR 模型权重。
| 架构 | 数据集 | 训练轮数 | AP25 | AP50 | 模型权重 | 评估指标 |
|---|---|---|---|---|---|---|
| 3DETR-m | SUN RGB-D | 90 | 51.0 | 22.0 | 权重 | 指标 |
| 3DETR-m | SUN RGB-D | 180 | 55.6 | 27.5 | 权重 | 指标 |
| 3DETR-m | SUN RGB-D | 360 | 58.2 | 30.6 | 权重 | 指标 |
| 3DETR-m | SUN RGB-D | 720 | 58.1 | 30.4 | 权重 | 指标 |
| 3DETR | SUN RGB-D | 90 | 43.7 | 16.2 | 权重 | 指标 |
| 3DETR | SUN RGB-D | 180 | 52.1 | 25.8 | 权重 | 指标 |
| 3DETR | SUN RGB-D | 360 | 56.3 | 29.6 | 权重 | 指标 |
| 3DETR | SUN RGB-D | 720 | 56.0 | 27.8 | 权重 | 指标 |
| 3DETR-m | ScanNet | 90 | 47.1 | 19.5 | 权重 | 指标 |
| 3DETR-m | ScanNet | 180 | 58.7 | 33.6 | 权重 | 指标 |
| 3DETR-m | ScanNet | 360 | 62.4 | 37.7 | 权重 | 指标 |
| 3DETR-m | ScanNet | 720 | 63.7 | 44.5 | 权重 | 指标 |
| 3DETR | ScanNet | 90 | 42.8 | 15.3 | 权重 | 指标 |
| 3DETR | ScanNet | 180 | 54.5 | 28.8 | 权重 | 指标 |
| 3DETR | ScanNet | 360 | 59.0 | 35.4 | 权重 | 指标 |
| 3DETR | ScanNet | 720 | 61.1 | 40.2 | 权重 | 指标 |
运行 3DETR
安装
我们的代码已在 PyTorch 1.9.0、CUDA 10.2 和 Python 3.6 环境下测试通过,也可能在其他版本中正常运行。
您需要通过以下命令安装 pointnet2 层:
cd third_party/pointnet2 && python setup.py install
此外,您还需要安装以下 Python 依赖项(可通过 conda install 或 pip install 安装):
matplotlib
opencv-python
plyfile
'trimesh>=2.35.39,<2.35.40'
'networkx>=2.2,<2.3'
scipy
部分用户在使用 CUDA 11 或更高版本时遇到了问题。如果遇到 CUDA 相关问题,请尝试使用 CUDA 10.2。
可选地,您可以安装 gIOU 的 Cython 化实现以加快训练速度。
conda install cython
cd utils && python cython_compile.py build_ext --inplace
基准测试
数据集准备
我们沿用了 VoteNet 代码库中的数据预处理流程。 SUN RGB-D 的预处理说明请参见 这里,ScanNet 的预处理说明请参见 这里。
您可以在 datasets/sunrgbd.py 和 datasets/scannet.py 中编辑数据集路径,也可以选择在运行时指定路径。
测试
准备好数据集后,您可以按照以下方式测试预训练模型:
python main.py --dataset_name <数据集名称> --nqueries <查询数量> --test_ckpt <检查点路径> --test_only [--enc_type masked]
对于 SUN RGB-D 数据集,我们使用 128 个查询;对于 ScanNet 数据集,使用 256 个查询。
在测试 3DETR-m 检查点时,您需要添加 --enc_type masked 标志。
请注意,测试过程具有随机性(由于点云采样和查询采样的随机性),因此每次运行的 AP25 结果可能会有 1% 左右的波动。这种推理过程的随机性在 VoteNet 等方法中也很常见。
如果您尚未编辑 datasets 文件夹中文件的数据集路径,则可以使用 --dataset_root_dir 标志来指定数据集的根目录路径。
训练
只需运行 main.py 即可简单地训练模型:
python main.py --dataset_name <数据集名称> --checkpoint_dir <保存输出的路径>
为了复现论文中的结果,我们在 scripts 文件夹中提供了相应的参数设置。不同训练运行之间预计会出现 AP25 约 1% 的差异。
您可以通过按照 scripts/scannet_quick.sh 文件中的说明,在 ScanNet 数据集上训练一个 3DETR 模型 90 个 epoch 来快速验证安装是否正确,并将其与 Model Zoo 中的预训练检查点进行比较。
许可证
3DETR 的大部分代码采用 Apache 2.0 许可证,具体见 LICENSE 文件。然而,项目中部分组件使用了单独的许可证条款:PointNet2 的许可信息可在 https://github.com/erikwijmans/Pointnet2_PyTorch/blob/master/UNLICENSE 找到。
贡献
我们欢迎您的拉取请求!有关更多信息,请参阅 CONTRIBUTING 和 CODE_OF_CONDUCT。
引用
如果您觉得本仓库对您有所帮助,请考虑给它加星 :star: 并引用以下文献:
@inproceedings{misra2021-3detr,
title={{An End-to-End Transformer Model for 3D Object Detection}},
author={Misra, Ishan and Girdhar, Rohit and Joulin, Armand},
booktitle={{ICCV}},
year={2021},
}
常见问题
相似工具推荐
ML-For-Beginners
ML-For-Beginners 是由微软推出的一套系统化机器学习入门课程,旨在帮助零基础用户轻松掌握经典机器学习知识。这套课程将学习路径规划为 12 周,包含 26 节精炼课程和 52 道配套测验,内容涵盖从基础概念到实际应用的完整流程,有效解决了初学者面对庞大知识体系时无从下手、缺乏结构化指导的痛点。 无论是希望转型的开发者、需要补充算法背景的研究人员,还是对人工智能充满好奇的普通爱好者,都能从中受益。课程不仅提供了清晰的理论讲解,还强调动手实践,让用户在循序渐进中建立扎实的技能基础。其独特的亮点在于强大的多语言支持,通过自动化机制提供了包括简体中文在内的 50 多种语言版本,极大地降低了全球不同背景用户的学习门槛。此外,项目采用开源协作模式,社区活跃且内容持续更新,确保学习者能获取前沿且准确的技术资讯。如果你正寻找一条清晰、友好且专业的机器学习入门之路,ML-For-Beginners 将是理想的起点。
funNLP
funNLP 是一个专为中文自然语言处理(NLP)打造的超级资源库,被誉为"NLP 民工的乐园”。它并非单一的软件工具,而是一个汇集了海量开源项目、数据集、预训练模型和实用代码的综合性平台。 面对中文 NLP 领域资源分散、入门门槛高以及特定场景数据匮乏的痛点,funNLP 提供了“一站式”解决方案。这里不仅涵盖了分词、命名实体识别、情感分析、文本摘要等基础任务的标准工具,还独特地收录了丰富的垂直领域资源,如法律、医疗、金融行业的专用词库与数据集,甚至包含古诗词生成、歌词创作等趣味应用。其核心亮点在于极高的全面性与实用性,从基础的字典词典到前沿的 BERT、GPT-2 模型代码,再到高质量的标注数据和竞赛方案,应有尽有。 无论是刚刚踏入 NLP 领域的学生、需要快速验证想法的算法工程师,还是从事人工智能研究的学者,都能在这里找到急需的“武器弹药”。对于开发者而言,它能大幅减少寻找数据和复现模型的时间;对于研究者,它提供了丰富的基准测试资源和前沿技术参考。funNLP 以开放共享的精神,极大地降低了中文自然语言处理的开发与研究成本,是中文 AI 社区不可或缺的宝藏仓库。
cs-video-courses
cs-video-courses 是一个精心整理的计算机科学视频课程清单,旨在为自学者提供系统化的学习路径。它汇集了全球知名高校(如加州大学伯克利分校、新南威尔士大学等)的完整课程录像,涵盖从编程基础、数据结构与算法,到操作系统、分布式系统、数据库等核心领域,并深入延伸至人工智能、机器学习、量子计算及区块链等前沿方向。 面对网络上零散且质量参差不齐的教学资源,cs-video-courses 解决了学习者难以找到成体系、高难度大学级别课程的痛点。该项目严格筛选内容,仅收录真正的大学层级课程,排除了碎片化的简短教程或商业广告,确保用户能接触到严谨的学术内容。 这份清单特别适合希望夯实计算机基础的开发者、需要补充特定领域知识的研究人员,以及渴望像在校生一样系统学习计算机科学的自学者。其独特的技术亮点在于分类极其详尽,不仅包含传统的软件工程与网络安全,还细分了生成式 AI、大语言模型、计算生物学等新兴学科,并直接链接至官方视频播放列表,让用户能一站式获取高质量的教育资源,免费享受世界顶尖大学的课堂体验。
ragflow
RAGFlow 是一款领先的开源检索增强生成(RAG)引擎,旨在为大语言模型构建更精准、可靠的上下文层。它巧妙地将前沿的 RAG 技术与智能体(Agent)能力相结合,不仅支持从各类文档中高效提取知识,还能让模型基于这些知识进行逻辑推理和任务执行。 在大模型应用中,幻觉问题和知识滞后是常见痛点。RAGFlow 通过深度解析复杂文档结构(如表格、图表及混合排版),显著提升了信息检索的准确度,从而有效减少模型“胡编乱造”的现象,确保回答既有据可依又具备时效性。其内置的智能体机制更进一步,使系统不仅能回答问题,还能自主规划步骤解决复杂问题。 这款工具特别适合开发者、企业技术团队以及 AI 研究人员使用。无论是希望快速搭建私有知识库问答系统,还是致力于探索大模型在垂直领域落地的创新者,都能从中受益。RAGFlow 提供了可视化的工作流编排界面和灵活的 API 接口,既降低了非算法背景用户的上手门槛,也满足了专业开发者对系统深度定制的需求。作为基于 Apache 2.0 协议开源的项目,它正成为连接通用大模型与行业专有知识之间的重要桥梁。
PaddleOCR
PaddleOCR 是一款基于百度飞桨框架开发的高性能开源光学字符识别工具包。它的核心能力是将图片、PDF 等文档中的文字提取出来,转换成计算机可读取的结构化数据,让机器真正“看懂”图文内容。 面对海量纸质或电子文档,PaddleOCR 解决了人工录入效率低、数字化成本高的问题。尤其在人工智能领域,它扮演着连接图像与大型语言模型(LLM)的桥梁角色,能将视觉信息直接转化为文本输入,助力智能问答、文档分析等应用场景落地。 PaddleOCR 适合开发者、算法研究人员以及有文档自动化需求的普通用户。其技术优势十分明显:不仅支持全球 100 多种语言的识别,还能在 Windows、Linux、macOS 等多个系统上运行,并灵活适配 CPU、GPU、NPU 等各类硬件。作为一个轻量级且社区活跃的开源项目,PaddleOCR 既能满足快速集成的需求,也能支撑前沿的视觉语言研究,是处理文字识别任务的理想选择。
awesome-machine-learning
awesome-machine-learning 是一份精心整理的机器学习资源清单,汇集了全球优秀的机器学习框架、库和软件工具。面对机器学习领域技术迭代快、资源分散且难以甄选的痛点,这份清单按编程语言(如 Python、C++、Go 等)和应用场景(如计算机视觉、自然语言处理、深度学习等)进行了系统化分类,帮助使用者快速定位高质量项目。 它特别适合开发者、数据科学家及研究人员使用。无论是初学者寻找入门库,还是资深工程师对比不同语言的技术选型,都能从中获得极具价值的参考。此外,清单还延伸提供了免费书籍、在线课程、行业会议、技术博客及线下聚会等丰富资源,构建了从学习到实践的全链路支持体系。 其独特亮点在于严格的维护标准:明确标记已停止维护或长期未更新的项目,确保推荐内容的时效性与可靠性。作为机器学习领域的“导航图”,awesome-machine-learning 以开源协作的方式持续更新,旨在降低技术探索门槛,让每一位从业者都能高效地站在巨人的肩膀上创新。