OpenLane
OpenLane 是一个大规模、真实场景下的 3D 车道线数据集,旨在推动自动驾驶中的 3D 感知研究。它基于 Waymo 开放数据集构建,包含 1000 个视频片段、约 20 万帧图像和超过 88 万条精细标注的车道线,同时还提供“路径最近物体”(CIPO)和场景标签(如天气、光照等)信息。传统车道检测多局限于 2D 或仿真环境,而 OpenLane 提供了真实世界中复杂道路结构的 3D 标注,解决了高质量 3D 车道数据稀缺的问题。该数据集特别适合自动驾驶领域的研究人员和算法开发者,可用于训练和评估 3D 车道检测、场景理解等模型。其技术亮点包括统一的坐标系标注、时序帧位姿信息支持序列建模,以及配套的标准化评估工具包。使用前需注册 Waymo 开放数据集并遵守其许可协议。OpenLane 与芯片设计工具 OpenLane 同名但无关联,请注意区分。
使用场景
某自动驾驶初创公司的感知算法团队正在研发高精度3D车道线检测模型,用于城市复杂道路环境下的车辆定位与路径规划。
没有 OpenLane 时
- 团队只能依赖合成数据或小规模自采数据集,难以覆盖真实世界中弯道、坡道、遮挡等多样场景。
- 缺乏统一的3D车道标注标准和评估协议,不同模块间结果难以对齐,调试效率低下。
- 需自行从原始传感器数据中提取车道信息并构建真值,耗时数月且标注质量不稳定。
- 无法有效验证模型在长距离、跨帧一致性等关键指标上的表现,上线风险高。
- 与学术界最新进展脱节,难以复现论文方法或参与公开竞赛。
使用 OpenLane 后
- 直接使用包含20万帧、88万条精细标注的真实3D车道数据,快速覆盖城市主干道、匝道、施工区等复杂场景。
- 基于OpenLane提供的标准化标注格式和官方评估工具包,团队一周内就搭建起可复现的训练-评估闭环。
- 利用已对齐的Waymo数据与位姿信息,轻松实现时序建模和多帧融合策略验证。
- 在OpenLane Leaderboard上横向对比PersFormer等SOTA方法,明确优化方向,模型F1-score提升12%。
- 凭借在OpenLane上的良好表现,团队成功入围OpenDriveLab举办的自动驾驶挑战赛决赛。
OpenLane为3D车道感知研究提供了稀缺的真实世界基准,大幅降低算法研发门槛并加速技术迭代。
运行环境要求
- 未说明
未说明
未说明
快速开始
[!IMPORTANT] 🌟 请访问 opendrivelab.com 获取最新动态!
OpenLane-V1
OpenLane 是目前首个真实世界、规模最大的 3D 车道线(lane)数据集。我们的数据集基于 公开感知数据集 构建,为 1000 个片段提供了车道线及路径最近物体(CIPO, Closest-In-Path Object)的标注。简而言之,OpenLane 包含 20 万 帧图像和超过 88 万 条精心标注的车道线。我们已公开发布 OpenLane 数据集,以助力研究社区在 3D 感知与自动驾驶技术方面取得进展。详情请参见 论文。
本仓库结构如下:
注意:我们的 OpenLane 是一个自动驾驶数据集,而另一个同名仓库 The-OpenROAD-Project/OpenLane 与此无关。
新闻
- [2023/03]:我们发布了全新的场景理解数据集,并正在举办相关挑战赛,欢迎访问 OpenLane-V2 和 挑战赛官网 :star:。
- [2023/03]:我们已在 paperswithcode 维护排行榜 :microphone:。
- [2022/11]:我们发布了 OpenLane 数据集
v1.2版本,主要更新包括: - [2022/09]:更新评估指标,在评估前根据可见性对真值(gt)点进行剪枝,修复了问题 A question about prune_3d_lane_by_visibility。
- [2022/07]:我们发布了 OpenLane 数据集
v1.1版本,修复了 3D 车道线评估问题 及部分 JSON 文件不匹配的问题。 - [2022/04]:我们发布了 PersFormer 代码库 v1.0,为 OpenLane 数据集提供了一个基线方法。
- [2022/03]:我们发布了 OpenLane 数据集 v1.0,包含 1000 个片段,带有 3D/2D 车道线及 CIPO/场景的标注。
快速开始
请按照以下步骤熟悉 OpenLane 数据集。如需更多信息,请提交 issue。
下载
您可以在此下载完整的 OpenLane 数据集。请注意,由于 OpenLane 基于 Waymo Open Dataset 构建,在使用前您需在 Waymo Open Dataset 官网 注册并同意其使用条款。
评估工具包
我们提供了针对车道线和 CIPO 的评估工具,遵循与 Waymo 相同的数据格式以及 2D/3D 车道线检测中通用的评估流程。详情请参考 评估工具包说明。
数据
OpenLane 数据集构建于自动驾驶领域的主流数据集之上。在 v1.0 中,我们基于 Waymo Open Dataset 发布了标注数据。未来我们还将为 nuScenes 提供标注。
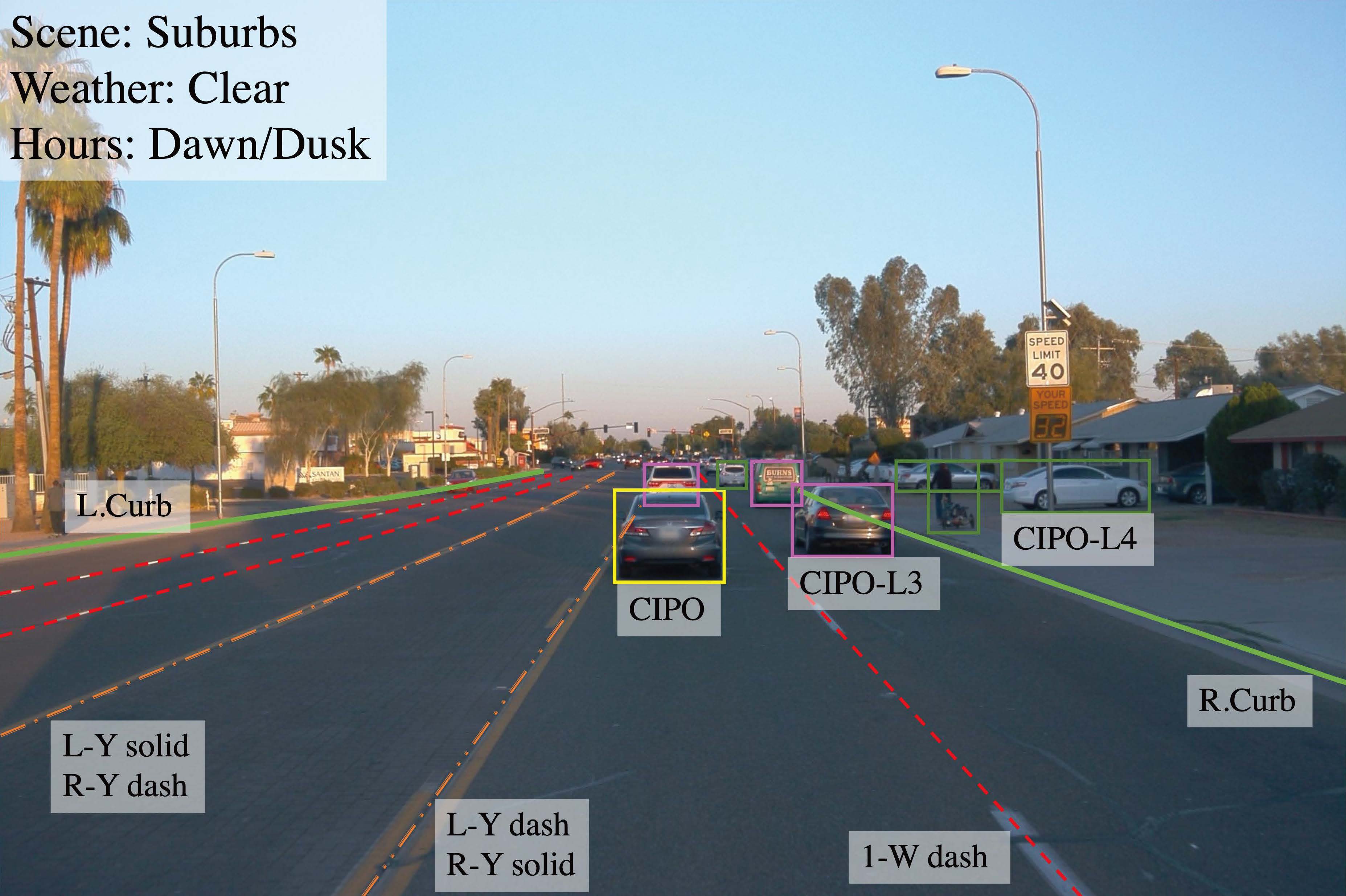
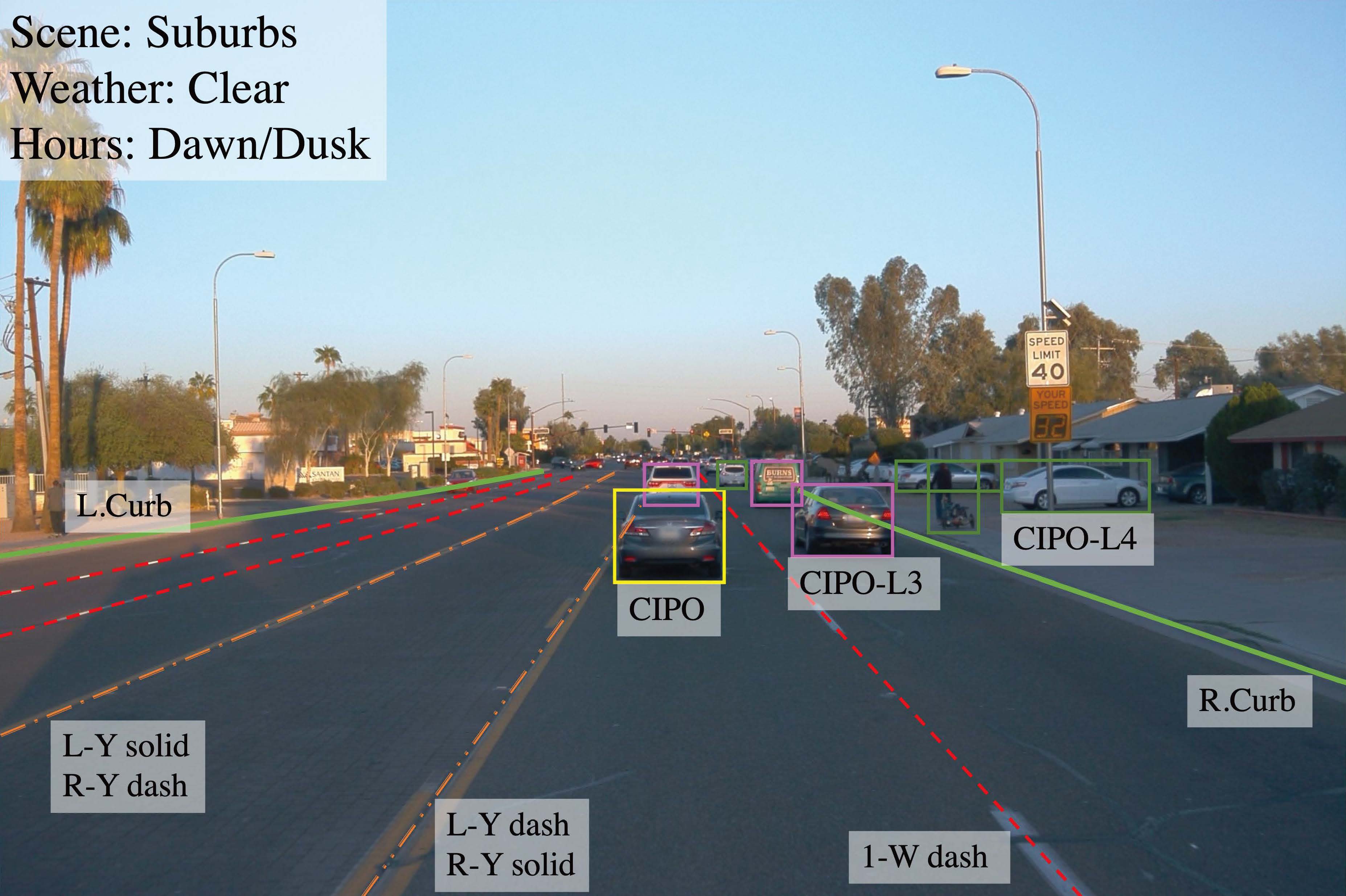
OpenLane 数据集聚焦于车道线检测及 CIPO。我们标注了每一帧中的所有车道线,包括在无路缘隔离的情况下对向车道的车道线。除车道线检测任务外,我们还标注了:(a) 场景标签,如天气和地点;(b) CIPO(路径最近物体),即相对于自车(ego vehicle)最需关注的目标;此类标签对于后续的规划/控制模块具有实际意义,而不仅限于感知模块输出的完整物体集合。坐标系 的说明请参见此处。
车道线标注
我们采用以下格式标注车道线:
- 车道线形状:每条 2D/3D 车道线表示为一组 2D/3D 点。
- 车道线类别:每条车道线具有类别,例如双黄线或路缘(curb)。
- 车道线属性:部分车道线具有方向属性,如“右”、“左”。
- 车道线跟踪 ID:除路缘外,每条车道线均具有唯一 ID。
更多标注准则请参考 车道线标注规范。
CIPO/场景标注
我们采用以下格式标注 CIPO 和场景:
- 2D 边界框:附带表示物体重要性级别的类别。
- 场景标签:描述该帧采集时所处的场景。
- 天气标签:描述该帧采集时的天气状况。
- 时间标签:标注该帧采集的时间段。
更多标注准则请参考 CIPO 标注规范。
基准测试与排行榜
基准测试(Benchmark)
我们提供了在 OpenLane 2D/3D 车道线检测任务上的初步基准测试结果,欢迎通过 Pull Request 提交您的工作!为了全面评估模型性能,我们将整个验证集划分为多种场景:上坡与下坡(Up&Down)、弯道(Curve)、极端天气(Extreme Weather)、夜间(Night)、交叉路口(Intersection)以及车道合并与分叉(Merge&Split)。更多细节请参见 车道标注标准(Lane Anno Criterion)。
基于 车道评估指标(Lane Eval Metric),不同 2D/3D 方法在各类场景下的结果(F-Score)如下所示:
- 2D 车道线检测
| 方法(Method) | 全部(All) | 上坡与 下坡(Up& Down) |
弯道(Curve) | 极端 天气(Extreme Weather) |
夜间(Night) | 交叉路口(Intersection) | 合并与 分叉(Merge& Split) |
|---|---|---|---|---|---|---|---|
| LaneATT-S | 28.3 | 25.3 | 25.8 | 32.0 | 27.6 | 14.0 | 24.3 |
| LaneATT-M | 31.0 | 28.3 | 27.4 | 34.7 | 30.2 | 17.0 | 26.5 |
| PersFormer | 42.0 | 40.7 | 46.3 | 43.7 | 36.1 | 28.9 | 41.2 |
| CondLaneNet-S | 52.3 | 55.3 | 57.5 | 45.8 | 46.6 | 48.4 | 45.5 |
| CondLaneNet-M | 55.0 | 58.5 | 59.4 | 49.2 | 48.6 | 50.7 | 47.8 |
| CondLaneNet-L | 59.1 | 62.1 | 62.9 | 54.7 | 51.0 | 55.7 | 52.3 |
- 3D 车道线检测
| 方法(Method) | 版本(Version) | 全部(All) | 上坡与 下坡(Up & Down) |
弯道(Curve) | 极端 天气(Extreme Weather) |
夜间(Night) | 交叉路口(Intersection) | 合并与 分叉(Merge& Split) |
最佳模型(Best model) | x-c | x-f | z-c | z-f | 类别准确率(Category Accuracy) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GenLaneNet | 1.1 | 32.3 | 25.4 | 33.5 | 28.1 | 18.7 | 21.4 | 31.0 | model | 0.593 | 0.494 | 0.140 | 0.195 | / |
| 3DLaneNet | 1.1 | 44.1 | 40.8 | 46.5 | 47.5 | 41.5 | 32.1 | 41.7 | - | - | - | - | - | - |
| PersFormer | 1.1 | 50.5 | 45.6 | 58.7 | 54.0 | 50.0 | 41.6 | 53.1 | model | 0.319 | 0.325 | 0.112 | 0.141 | 89.51 |
| PersFormer | 1.2 | 52.9 | 47.5 | 58.4 | 51.8 | 47.4 | 42.1 | 50.9 | model | 0.291 | 0.294 | 0.080 | 0.116 | 89.24 |
PersFormer 的实现代码可在此处找到:https://github.com/OpenDriveLab/PersFormer_3DLane。
排行榜(Leaderboard)
为便于比较,我们在 paperswithcode 上提供了排行榜。
引用(Citation)
引用 OpenLane 时,请使用以下 BibTeX:
@inproceedings{chen2022persformer,
title={PersFormer: 3D Lane Detection via Perspective Transformer and the OpenLane Benchmark},
author={Chen, Li and Sima, Chonghao and Li, Yang and Zheng, Zehan and Xu, Jiajie and Geng, Xiangwei and Li, Hongyang and He, Conghui and Shi, Jianping and Qiao, Yu and Yan, Junchi},
booktitle={European Conference on Computer Vision (ECCV)},
year={2022}
}
许可证(License)
本数据集基于 Waymo 开放数据集(Waymo Open Dataset) 构建,因此数据遵循 知识共享署名-非商业性使用-相同方式共享 4.0 国际许可协议(Creative Commons Attribution-NonCommercial-ShareAlike 4.0 International License) 以及 Waymo 非商业用途数据集许可协议(2019 年 8 月版) 发布。您可以自由地分享和改编这些数据,但必须给予适当署名,且不得用于商业目的。
本仓库中的所有代码均采用 Apache License 2.0 许可。
常见问题
相似工具推荐
stable-diffusion-webui
stable-diffusion-webui 是一个基于 Gradio 构建的网页版操作界面,旨在让用户能够轻松地在本地运行和使用强大的 Stable Diffusion 图像生成模型。它解决了原始模型依赖命令行、操作门槛高且功能分散的痛点,将复杂的 AI 绘图流程整合进一个直观易用的图形化平台。 无论是希望快速上手的普通创作者、需要精细控制画面细节的设计师,还是想要深入探索模型潜力的开发者与研究人员,都能从中获益。其核心亮点在于极高的功能丰富度:不仅支持文生图、图生图、局部重绘(Inpainting)和外绘(Outpainting)等基础模式,还独创了注意力机制调整、提示词矩阵、负向提示词以及“高清修复”等高级功能。此外,它内置了 GFPGAN 和 CodeFormer 等人脸修复工具,支持多种神经网络放大算法,并允许用户通过插件系统无限扩展能力。即使是显存有限的设备,stable-diffusion-webui 也提供了相应的优化选项,让高质量的 AI 艺术创作变得触手可及。
everything-claude-code
everything-claude-code 是一套专为 AI 编程助手(如 Claude Code、Codex、Cursor 等)打造的高性能优化系统。它不仅仅是一组配置文件,而是一个经过长期实战打磨的完整框架,旨在解决 AI 代理在实际开发中面临的效率低下、记忆丢失、安全隐患及缺乏持续学习能力等核心痛点。 通过引入技能模块化、直觉增强、记忆持久化机制以及内置的安全扫描功能,everything-claude-code 能显著提升 AI 在复杂任务中的表现,帮助开发者构建更稳定、更智能的生产级 AI 代理。其独特的“研究优先”开发理念和针对 Token 消耗的优化策略,使得模型响应更快、成本更低,同时有效防御潜在的攻击向量。 这套工具特别适合软件开发者、AI 研究人员以及希望深度定制 AI 工作流的技术团队使用。无论您是在构建大型代码库,还是需要 AI 协助进行安全审计与自动化测试,everything-claude-code 都能提供强大的底层支持。作为一个曾荣获 Anthropic 黑客大奖的开源项目,它融合了多语言支持与丰富的实战钩子(hooks),让 AI 真正成长为懂上
ComfyUI
ComfyUI 是一款功能强大且高度模块化的视觉 AI 引擎,专为设计和执行复杂的 Stable Diffusion 图像生成流程而打造。它摒弃了传统的代码编写模式,采用直观的节点式流程图界面,让用户通过连接不同的功能模块即可构建个性化的生成管线。 这一设计巧妙解决了高级 AI 绘图工作流配置复杂、灵活性不足的痛点。用户无需具备编程背景,也能自由组合模型、调整参数并实时预览效果,轻松实现从基础文生图到多步骤高清修复等各类复杂任务。ComfyUI 拥有极佳的兼容性,不仅支持 Windows、macOS 和 Linux 全平台,还广泛适配 NVIDIA、AMD、Intel 及苹果 Silicon 等多种硬件架构,并率先支持 SDXL、Flux、SD3 等前沿模型。 无论是希望深入探索算法潜力的研究人员和开发者,还是追求极致创作自由度的设计师与资深 AI 绘画爱好者,ComfyUI 都能提供强大的支持。其独特的模块化架构允许社区不断扩展新功能,使其成为当前最灵活、生态最丰富的开源扩散模型工具之一,帮助用户将创意高效转化为现实。
NextChat
NextChat 是一款轻量且极速的 AI 助手,旨在为用户提供流畅、跨平台的大模型交互体验。它完美解决了用户在多设备间切换时难以保持对话连续性,以及面对众多 AI 模型不知如何统一管理的痛点。无论是日常办公、学习辅助还是创意激发,NextChat 都能让用户随时随地通过网页、iOS、Android、Windows、MacOS 或 Linux 端无缝接入智能服务。 这款工具非常适合普通用户、学生、职场人士以及需要私有化部署的企业团队使用。对于开发者而言,它也提供了便捷的自托管方案,支持一键部署到 Vercel 或 Zeabur 等平台。 NextChat 的核心亮点在于其广泛的模型兼容性,原生支持 Claude、DeepSeek、GPT-4 及 Gemini Pro 等主流大模型,让用户在一个界面即可自由切换不同 AI 能力。此外,它还率先支持 MCP(Model Context Protocol)协议,增强了上下文处理能力。针对企业用户,NextChat 提供专业版解决方案,具备品牌定制、细粒度权限控制、内部知识库整合及安全审计等功能,满足公司对数据隐私和个性化管理的高标准要求。
ML-For-Beginners
ML-For-Beginners 是由微软推出的一套系统化机器学习入门课程,旨在帮助零基础用户轻松掌握经典机器学习知识。这套课程将学习路径规划为 12 周,包含 26 节精炼课程和 52 道配套测验,内容涵盖从基础概念到实际应用的完整流程,有效解决了初学者面对庞大知识体系时无从下手、缺乏结构化指导的痛点。 无论是希望转型的开发者、需要补充算法背景的研究人员,还是对人工智能充满好奇的普通爱好者,都能从中受益。课程不仅提供了清晰的理论讲解,还强调动手实践,让用户在循序渐进中建立扎实的技能基础。其独特的亮点在于强大的多语言支持,通过自动化机制提供了包括简体中文在内的 50 多种语言版本,极大地降低了全球不同背景用户的学习门槛。此外,项目采用开源协作模式,社区活跃且内容持续更新,确保学习者能获取前沿且准确的技术资讯。如果你正寻找一条清晰、友好且专业的机器学习入门之路,ML-For-Beginners 将是理想的起点。
ragflow
RAGFlow 是一款领先的开源检索增强生成(RAG)引擎,旨在为大语言模型构建更精准、可靠的上下文层。它巧妙地将前沿的 RAG 技术与智能体(Agent)能力相结合,不仅支持从各类文档中高效提取知识,还能让模型基于这些知识进行逻辑推理和任务执行。 在大模型应用中,幻觉问题和知识滞后是常见痛点。RAGFlow 通过深度解析复杂文档结构(如表格、图表及混合排版),显著提升了信息检索的准确度,从而有效减少模型“胡编乱造”的现象,确保回答既有据可依又具备时效性。其内置的智能体机制更进一步,使系统不仅能回答问题,还能自主规划步骤解决复杂问题。 这款工具特别适合开发者、企业技术团队以及 AI 研究人员使用。无论是希望快速搭建私有知识库问答系统,还是致力于探索大模型在垂直领域落地的创新者,都能从中受益。RAGFlow 提供了可视化的工作流编排界面和灵活的 API 接口,既降低了非算法背景用户的上手门槛,也满足了专业开发者对系统深度定制的需求。作为基于 Apache 2.0 协议开源的项目,它正成为连接通用大模型与行业专有知识之间的重要桥梁。