PatchmatchNet
PatchmatchNet 是一款面向多视角立体重建(MVS)的开源深度学习框架,由 ETH Zürich 团队发表于 CVPR 2021。它把传统 Patchmatch 的思想改造成级联式神经网络,在保持精度的同时,把显存占用和运行时间都压到极低,让你能在单张消费级显卡上跑 4K 级图像的三维重建。
如果你正在做无人机测绘、文保数字化、VR 场景建模,或需要为 SLAM/AR 应用快速生成稠密点云,PatchmatchNet 可以直接拿来训练和推理;代码已支持 DTU、Tanks & Temples、ETH3D 等主流数据集,也允许自定义相机参数与图像格式。
亮点:
• 级联 Patchmatch + 可学习的自适应采样,显存节省 50 % 以上;
• 支持 TorchScript 导出,方便部署到 C++/移动端;
• 提供预训练权重,一条命令即可复现论文结果。
只需 Python 3.8 + CUDA 10.1,十分钟装好依赖,就能开始你的多视角立体之旅。
使用场景
某县级文保所要对一座 600 年历史的砖木古戏楼进行毫米级三维建模,用于修缮前的病害评估与数字存档。由于场地狭窄、光照复杂,只能使用手持相机在 15 分钟内快速拍摄 120 张 4K 照片。
没有 PatchmatchNet 时
- 传统 COLMAP + MVSNet 流程在 4K 分辨率下显存爆炸,RTX 3080 12 GB 直接 OOM,被迫把图片缩到 1K,细节丢失严重,砖缝和雕花无法分辨。
- 完整重建耗时 3.5 小时,其中光 Patchmatch 阶段就占 2 小时,导致现场只能等结果,无法当天二次补拍。
- 内存峰值 28 GB,文保所的老工作站 16 GB 内存频繁 swap,操作员只能半夜跑任务,白天电脑几乎卡死。
- 最终点云在飞檐下方出现大面积空洞,需要人工补洞,额外花费 2 天。
使用 PatchmatchNet 后
- 同样的 4K 原图在 RTX 3080 上 8 GB 显存即可跑通,无需降分辨率,砖缝纹理清晰到能数清每块砖的破损。
- 完整重建压缩到 28 分钟,Patchmatch 阶段仅 7 分钟,现场拍完即可预览粗模,当场发现屋檐缺角并立即补拍。
- 内存占用降到 10 GB,老工作站也能流畅跑,白天正常办公,晚上下班前就能拿到结果。
- 飞檐下方空洞减少 80%,直接输出 watertight mesh,省去人工补洞,两天压缩成 30 分钟人工检查。
PatchmatchNet 让县级文保所在普通硬件上也能当天完成毫米级古建三维建档,真正做到了“拍完即走,细节不丢”。
运行环境要求
- 未说明
需要 NVIDIA GPU,CUDA ≥ 10.1,显存大小未说明(建议 ≥ 8 GB)
未说明

快速开始
PatchmatchNet(CVPR2021 口头报告)
论文《PatchmatchNet:学习型多视图 Patchmatch 立体视觉》的官方源代码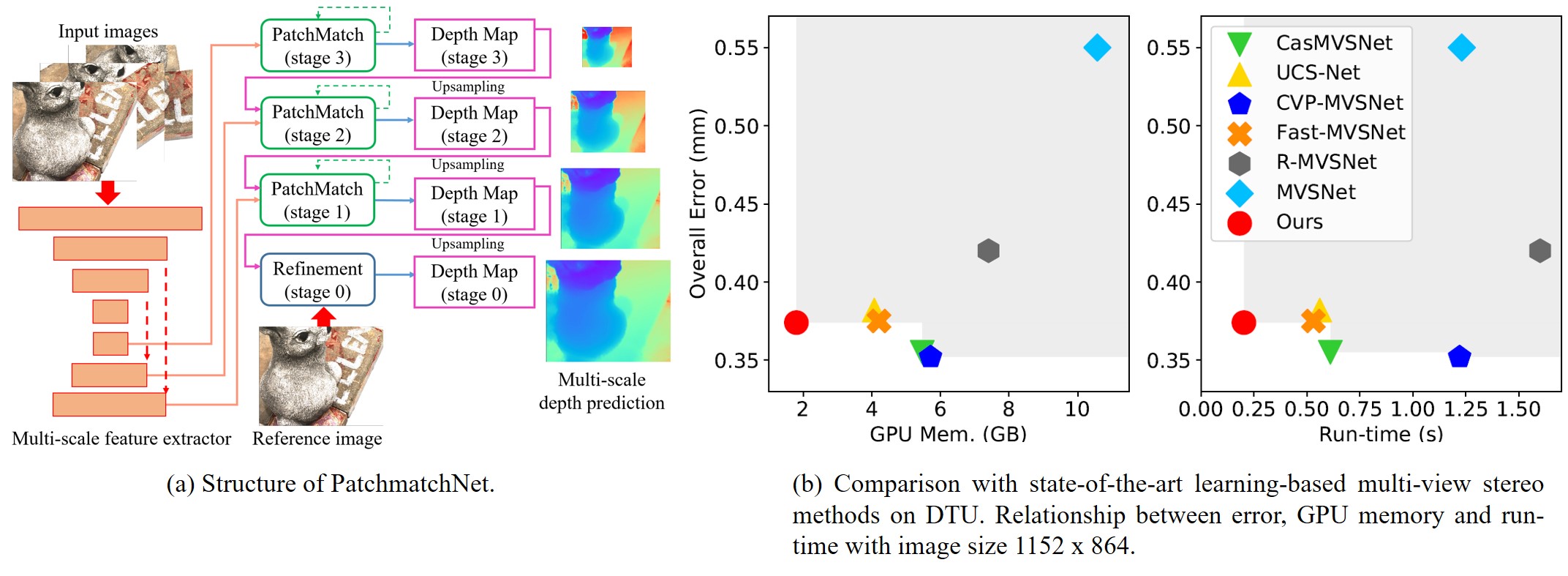
更新内容
- 2025年9月19日:推出全新的 MVS 流水线,该流水线在 GPU 显存占用和运行时间上更为高效,且性能远超 PatchmatchNet。
- 2025年5月19日:对于希望复现我们论文结果的用户,请参考 此版本。当前的 checkpoint 是由其他贡献者重新训练得到的。
- 2021年12月13日:更新了训练与评估数据集的统一格式,支持任意图像尺寸及多相机设置,并对脚本参数进行了新命名。
- 2021年9月27日:代码现已支持 Torchscript 导出,并附带一个预训练的 TorchScript 模块。
简介
PatchmatchNet 是一种新颖的基于学习的 Patchmatch 级联架构,旨在降低高分辨率多视图立体视觉任务中的显存消耗与计算时间。如果您认为该项目对您的研究有所帮助,请引用:
@misc{wang2020patchmatchnet,
title={PatchmatchNet: Learned Multi-View Patchmatch Stereo},
author={Fangjinhua Wang and Silvano Galliani and Christoph Vogel and Pablo Speciale and Marc Pollefeys},
journal={CVPR},
year={2021}
}
安装
需求
- Python 3.8
- CUDA >= 10.1
pip install -r requirements.txt
结果复现
- 下载我们预处理好的数据集: DTU 的评估集、 Tanks & Temples 以及 ETH3D 基准。每个数据集均已按如下结构组织:
根目录
├──scan1 (场景名1)
├──scan2 (场景名2)
├── images
│ ├── 00000000.jpg
│ ├── 00000001.jpg
│ └── ...
├── cams
│ ├── 00000000_cam.txt
│ ├── 00000001_cam.txt
│ └── ...
└── pair.txt
注意:
- Tanks & Temples 和 ETH3D 的子文件夹不会命名为
scanN,但位于./lists/eth3d和./lists/tanks中的列表将采用正确的命名规范。 - 如果 images 和 cameras 文件夹以及 pair 文件未遵循标准命名规则,您可以在
datasets/mvs.py中修改MVSDataset的设置,以指定自定义的image_folder、cam_folder和pair_path。 - 默认情况下,
MVSDataset配置为处理 JPEG 图像。如果您使用其他格式(如 PNG),可以相应地修改MVSDataset的image_extension参数。
相机文件 cam.txt 存储了相机参数,包括外参、内参、最小深度和最大深度:
extrinsic
E00 E01 E02 E03
E10 E11 E12 E13
E20 E21 E22 E23
E30 E31 E32 E33
intrinsic
K00 K01 K02
K10 K11 K12
K20 K21 K22
DEPTH_MIN DEPTH_MAX
pair.txt 存储了视图选择结果。对于每张参考图像,文件中会列出 N(10 或更多)个最佳源视图:
TOTAL_IMAGE_NUM
IMAGE_ID0 # 参考图像 0 的索引
10 ID0 SCORE0 ID1 SCORE1 ... # 参考图像 0 的 10 个最佳源图像
IMAGE_ID1 # 参考图像 1 的索引
10 ID0 SCORE0 ID1 SCORE1 ... # 参考图像 1 的 10 个最佳源图像
...
- 在
eval.sh中,将DTU_TESTING、ETH3D_TESTING或TANK_TESTING设置为对应数据集的根目录,并取消注释相应数据集的评估命令(默认是在 DTU 的评估集上进行评估)。如果希望更改输出位置(默认与输入位置相同),请修改--output_folder参数。对于 Tanks,--scan_list可以是 intermediate 或 advanced;对于 ETH3D,可以是 test 或 train。 CKPT_FILE是 checkpoint 文件(我们的预训练模型为./checkpoints/params_000007.ckpt),如果您想使用自己的模型,请将其修改为相应路径。若要使用 TorchScript 模块中的模型,则可将 checkpoint 文件指定为./checkpoints/module_000007.pt,并设置选项--input_type module。- 在 GPU 上运行
sh eval.sh进行测试。代码包含深度图估计与深度融合功能,输出为.ply格式的点云。 - 对于 DTU 数据集的定量评估,需下载 SampleSet 和 Points。解压后将
Points文件夹放置于SampleSet/MVS Data/目录下。其结构如下:
SampleSet
├──MVS Data
└──Points
在 evaluations/dtu/BaseEvalMain_web.m 中,将 dataPath 设置为 SampleSet/MVS Data/ 的路径,plyPath 设置为存储重建点云的目录,resultsPath 设置为存储评估结果的目录。随后在 MATLAB 中运行 evaluations/dtu/BaseEvalMain_web.m。
结果如下:
| Acc. (mm) | Comp. (mm) | Overall (mm) |
|---|---|---|
| 0.427 | 0.277 | 0.352 |
- 关于 Tanks & Temples 和 ETH3D 的详细定量结果,请查看排行榜: (Tanks & Temples、ETH3D)
自定义数据集上的评估
- 我们支持根据 COLMAP 的结果准备自定义数据集。脚本
colmap_input.py(基于 MVSNet 的脚本修改而来)可将 COLMAP 的稀疏重建结果转换为与我们提供的数据集相同的格式。COLMAP 在重建完成后会生成一个COLMAP/dense/文件夹,其中包含COLMAP/dense/images/和COLMAP/dense/sparse。随后您需要按如下方式运行:
python colmap_input.py --input_folder COLMAP/dense/
- 默认输出位置与输入位置相同。如需更改,可设置
--output_folder参数。 - 转换器的默认行为会为每张源图像寻找所有可能的相关图像。若您希望限制相关图像的最大数量,可设置
--num_src_images参数。 - 在
eval.sh中,将CUSTOM_TESTING设置为数据集的根目录,设置--output_folder为存储重建点云的目录(默认与输入目录相同),将--image_max_dim设置为合适的尺寸(由可用 GPU 显存和期望的处理速度决定),或直接移除该参数以使用原生尺寸,并取消注释评估命令。在 GPU 上运行sh eval.sh进行测试。
训练
下载预处理后的DTU训练数据、深度图以及已处理的相机参数,解压并按如下方式组织:
根目录
├── Cameras_1
│ ├── train
│ │ ├── 00000000_cam.txt
│ │ ├── 00000000_cam.txt
│ │ └── ...
│ └── pair.txt
├── Depths_raw
│ ├── scan1
│ │ ├── depth_map_0000.pfm
│ │ ├── depth_visual_0000.png
│ │ ├── depth_map_0001.pfm
│ │ ├── depth_visual_0001.png
│ │ └── ...
│ ├── scan2
│ └── ...
└── Rectified
├── scan1_train
│ ├── rect_001_0_r5000.png
│ ├── rect_001_1_r5000.png
│ ├── ...
│ ├── rect_001_6_r5000.png
│ ├── rect_002_0_r5000.png
│ ├── rect_002_1_r5000.png
│ ├── ...
│ ├── rect_002_6_r5000.png
│ └── ...
├── scan2_train
└── ...
若要直接使用该数据集,请参阅下方的旧版训练部分。对于当前版本的训练,需使用脚本convert_dtu_dataset.py将数据集转换为与./datasets/mvs.py中的MVSDataset兼容的格式,具体命令如下:
python convert_dtu_dataset.py --input_folder <原始数据集> --output_folder <转换后数据集> --scan_list ./lists/dtu/all.txt
转换后的数据集将以类似于评估数据集的格式存储:
根目录
├── scan1 (场景名1)
├── scan2 (场景名2)
│ ├── cams (相机参数)
│ │ ├── 00000000_cam.txt
│ │ ├── 00000001_cam.txt
│ │ └── ...
│ ├── depth_gt (真实深度图)
│ │ ├── 00000000.pfm
│ │ ├── 00000001.pfm
│ │ └── ...
│ ├── images (7个光照条件下的图像)
│ │ ├── 0 (光照条件0)
│ │ │ ├── 00000000.jpg
│ │ │ ├── 00000001.jpg
│ │ │ └── ...
│ │ ├── 1 (光照条件1)
│ │ └── ...
│ ├── masks (深度图掩码)
│ │ ├── 00000000.png
│ │ ├── 00000001.png
│ │ └── ...
│ └── pair.txt
└── ...
- 在
train.sh中,将MVS_TRAINING设置为转换后数据集的根目录;将--output_path设置为存放检查点的目录。 - 通过运行
sh train.sh来训练模型。 - 每个epoch的输出包括一个检查点(模型参数)和一个TorchScript模块,分别命名为
params_<epoch_id>.ckpt和module_<epoch_id>.pt。
旧版训练
若要直接在原始DTU数据集上进行训练,则需从train.sh脚本调用旧版训练脚本train_dtu.py(使用来自datasets/dtu_yao.py的旧版MVSDataset)。
- 在
train.sh中,将MVS_TRAINING设置为原始数据集的根目录;将--logdir设置为存放检查点的目录。 - 取消注释适用于旧版训练的部分,并注释掉其他条目。
- 通过运行
sh train.sh来训练模型。
注意:
--patchmatch_iteration表示多阶段Patchmatch的迭代次数(例如,默认值1,2,2表示第一阶段迭代1次,第二阶段迭代2次,第三阶段迭代2次)。--propagate_neighbors表示自适应传播的邻居数量(例如,默认值0,8,16表示第一阶段不进行Patchmatch传播,第二阶段使用8个邻居进行传播,第三阶段使用16个邻居进行传播)。正如我们在论文中所解释的,由于需要进行光度一致性过滤,我们在第一阶段的最后一轮Patchmatch中不采用自适应传播。因此,在我们的默认设置中(也适用于我们的预训练模型),我们将第一阶段的传播邻居数设为0,因为第一阶段的迭代次数为1。如果您希望在第一阶段增加更多的迭代次数,请相应调整--propagate_neighbors中的数值,以在除最后一轮外的所有阶段都启用Patchmatch的自适应传播。
致谢
本项目由“微软混合现实与人工智能苏黎世实验室”合作完成。
感谢姚瑶开源其优秀作品MVSNet。感谢郭晓阳开源其MVSNet的PyTorch实现MVSNet-pytorch。
常见问题
相似工具推荐
stable-diffusion-webui
stable-diffusion-webui 是一个基于 Gradio 构建的网页版操作界面,旨在让用户能够轻松地在本地运行和使用强大的 Stable Diffusion 图像生成模型。它解决了原始模型依赖命令行、操作门槛高且功能分散的痛点,将复杂的 AI 绘图流程整合进一个直观易用的图形化平台。 无论是希望快速上手的普通创作者、需要精细控制画面细节的设计师,还是想要深入探索模型潜力的开发者与研究人员,都能从中获益。其核心亮点在于极高的功能丰富度:不仅支持文生图、图生图、局部重绘(Inpainting)和外绘(Outpainting)等基础模式,还独创了注意力机制调整、提示词矩阵、负向提示词以及“高清修复”等高级功能。此外,它内置了 GFPGAN 和 CodeFormer 等人脸修复工具,支持多种神经网络放大算法,并允许用户通过插件系统无限扩展能力。即使是显存有限的设备,stable-diffusion-webui 也提供了相应的优化选项,让高质量的 AI 艺术创作变得触手可及。
everything-claude-code
everything-claude-code 是一套专为 AI 编程助手(如 Claude Code、Codex、Cursor 等)打造的高性能优化系统。它不仅仅是一组配置文件,而是一个经过长期实战打磨的完整框架,旨在解决 AI 代理在实际开发中面临的效率低下、记忆丢失、安全隐患及缺乏持续学习能力等核心痛点。 通过引入技能模块化、直觉增强、记忆持久化机制以及内置的安全扫描功能,everything-claude-code 能显著提升 AI 在复杂任务中的表现,帮助开发者构建更稳定、更智能的生产级 AI 代理。其独特的“研究优先”开发理念和针对 Token 消耗的优化策略,使得模型响应更快、成本更低,同时有效防御潜在的攻击向量。 这套工具特别适合软件开发者、AI 研究人员以及希望深度定制 AI 工作流的技术团队使用。无论您是在构建大型代码库,还是需要 AI 协助进行安全审计与自动化测试,everything-claude-code 都能提供强大的底层支持。作为一个曾荣获 Anthropic 黑客大奖的开源项目,它融合了多语言支持与丰富的实战钩子(hooks),让 AI 真正成长为懂上
ComfyUI
ComfyUI 是一款功能强大且高度模块化的视觉 AI 引擎,专为设计和执行复杂的 Stable Diffusion 图像生成流程而打造。它摒弃了传统的代码编写模式,采用直观的节点式流程图界面,让用户通过连接不同的功能模块即可构建个性化的生成管线。 这一设计巧妙解决了高级 AI 绘图工作流配置复杂、灵活性不足的痛点。用户无需具备编程背景,也能自由组合模型、调整参数并实时预览效果,轻松实现从基础文生图到多步骤高清修复等各类复杂任务。ComfyUI 拥有极佳的兼容性,不仅支持 Windows、macOS 和 Linux 全平台,还广泛适配 NVIDIA、AMD、Intel 及苹果 Silicon 等多种硬件架构,并率先支持 SDXL、Flux、SD3 等前沿模型。 无论是希望深入探索算法潜力的研究人员和开发者,还是追求极致创作自由度的设计师与资深 AI 绘画爱好者,ComfyUI 都能提供强大的支持。其独特的模块化架构允许社区不断扩展新功能,使其成为当前最灵活、生态最丰富的开源扩散模型工具之一,帮助用户将创意高效转化为现实。
NextChat
NextChat 是一款轻量且极速的 AI 助手,旨在为用户提供流畅、跨平台的大模型交互体验。它完美解决了用户在多设备间切换时难以保持对话连续性,以及面对众多 AI 模型不知如何统一管理的痛点。无论是日常办公、学习辅助还是创意激发,NextChat 都能让用户随时随地通过网页、iOS、Android、Windows、MacOS 或 Linux 端无缝接入智能服务。 这款工具非常适合普通用户、学生、职场人士以及需要私有化部署的企业团队使用。对于开发者而言,它也提供了便捷的自托管方案,支持一键部署到 Vercel 或 Zeabur 等平台。 NextChat 的核心亮点在于其广泛的模型兼容性,原生支持 Claude、DeepSeek、GPT-4 及 Gemini Pro 等主流大模型,让用户在一个界面即可自由切换不同 AI 能力。此外,它还率先支持 MCP(Model Context Protocol)协议,增强了上下文处理能力。针对企业用户,NextChat 提供专业版解决方案,具备品牌定制、细粒度权限控制、内部知识库整合及安全审计等功能,满足公司对数据隐私和个性化管理的高标准要求。
ML-For-Beginners
ML-For-Beginners 是由微软推出的一套系统化机器学习入门课程,旨在帮助零基础用户轻松掌握经典机器学习知识。这套课程将学习路径规划为 12 周,包含 26 节精炼课程和 52 道配套测验,内容涵盖从基础概念到实际应用的完整流程,有效解决了初学者面对庞大知识体系时无从下手、缺乏结构化指导的痛点。 无论是希望转型的开发者、需要补充算法背景的研究人员,还是对人工智能充满好奇的普通爱好者,都能从中受益。课程不仅提供了清晰的理论讲解,还强调动手实践,让用户在循序渐进中建立扎实的技能基础。其独特的亮点在于强大的多语言支持,通过自动化机制提供了包括简体中文在内的 50 多种语言版本,极大地降低了全球不同背景用户的学习门槛。此外,项目采用开源协作模式,社区活跃且内容持续更新,确保学习者能获取前沿且准确的技术资讯。如果你正寻找一条清晰、友好且专业的机器学习入门之路,ML-For-Beginners 将是理想的起点。
ragflow
RAGFlow 是一款领先的开源检索增强生成(RAG)引擎,旨在为大语言模型构建更精准、可靠的上下文层。它巧妙地将前沿的 RAG 技术与智能体(Agent)能力相结合,不仅支持从各类文档中高效提取知识,还能让模型基于这些知识进行逻辑推理和任务执行。 在大模型应用中,幻觉问题和知识滞后是常见痛点。RAGFlow 通过深度解析复杂文档结构(如表格、图表及混合排版),显著提升了信息检索的准确度,从而有效减少模型“胡编乱造”的现象,确保回答既有据可依又具备时效性。其内置的智能体机制更进一步,使系统不仅能回答问题,还能自主规划步骤解决复杂问题。 这款工具特别适合开发者、企业技术团队以及 AI 研究人员使用。无论是希望快速搭建私有知识库问答系统,还是致力于探索大模型在垂直领域落地的创新者,都能从中受益。RAGFlow 提供了可视化的工作流编排界面和灵活的 API 接口,既降低了非算法背景用户的上手门槛,也满足了专业开发者对系统深度定制的需求。作为基于 Apache 2.0 协议开源的项目,它正成为连接通用大模型与行业专有知识之间的重要桥梁。